Overview: YOLO and small-object detection
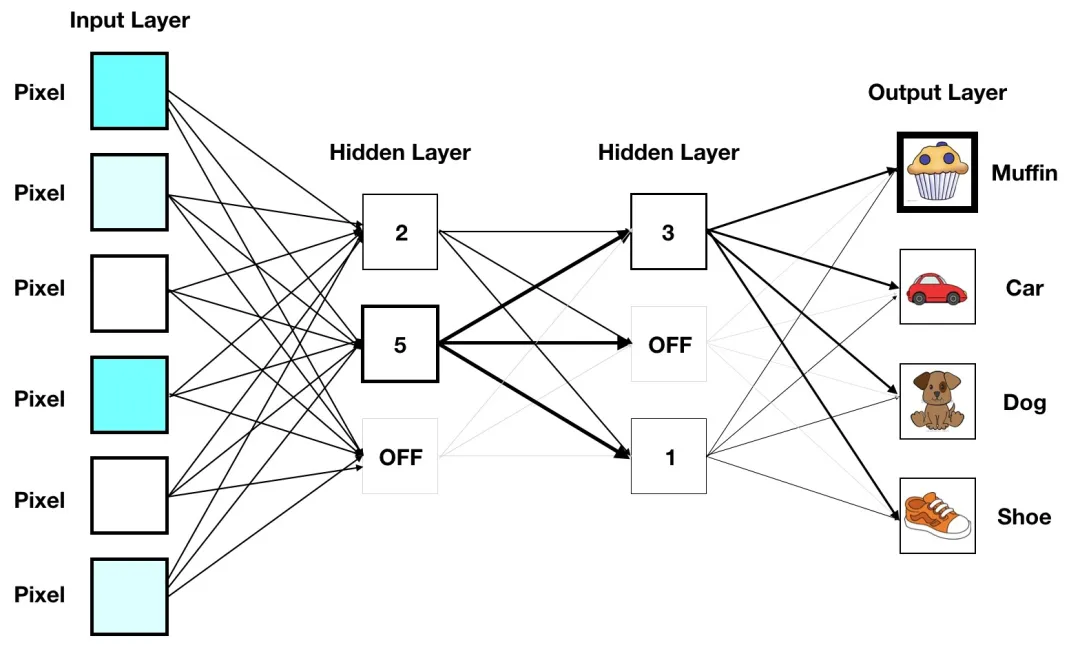
YOLO (You Only Look Once) is a neural network architecture for object detection in images. It divides the input image into a grid and records, for each cell, information about object presence and class to perform detection. Unlike other architectures, YOLO identifies objects and their classes with a single pass over the image. Modern drones often use YOLOv5 for rapid object discovery in video, human action analysis, or vehicle navigation. However, the architecture has limitations, such as difficulty detecting small objects due to model complexity and size. A PhD student from China, Zhang Jingwei, at Southern Federal University in Rostov-on-Don, proposed an improved L-YOLO algorithm that reduces computation while improving small-object detection performance compared with YOLOv5.
Quoted from the researcher:
"My research at Southern Federal University focuses on mathematical algorithm development. Based on the YOLOv5 model, I proposed the L-YOLO algorithm, which improves small-object detection performance while reducing model parameters and computational load, addressing small-object detection from UAV perspectives. The results show that L-YOLO is stronger for small-object detection and is more lightweight, indicating good application prospects for UAV-based target detection. Low-power small-object detection from UAV viewpoints is important for improving UAV application efficiency and functionality."
Foundations of flight control algorithms
The foundations of drone flight control algorithms are flight dynamics and control theory. Flight dynamics studies the motion of aircraft in air, including attitude control, stability, and handling. Control theory deals with designing controllers to achieve desired maneuvers and trajectories. These theoretical foundations underpin the design and optimization of UAV flight control algorithms.
Historical development of flight control algorithms
Early stage: At the start of UAV development, flight control algorithms mainly used traditional control methods such as PID controllers. PID controllers regulate proportional, integral, and derivative gains to control the aircraft. This approach is simple and easy to implement but has limited performance for complex missions and rapidly changing environments.
Intermediate stage: As UAV technology advanced, flight control algorithms incorporated more sophisticated methods. Model predictive control (MPC) uses a flight dynamics model and optimization to control the aircraft. MPC accounts for dynamics and constraints, improving control accuracy and stability.
Deep learning applications: Recently, deep learning has been widely applied to UAV flight control. Neural networks can learn complex control strategies and patterns. For example, convolutional neural networks (CNNs) are used for image recognition and target tracking, while recurrent neural networks (RNNs) process and predict sequence data. These methods enhance autonomy and perception capabilities.
Innovations in control algorithms
Attitude control algorithms: Companies and research groups have developed innovative attitude control algorithms to achieve stable flight and high maneuverability. Adaptive control approaches can provide precise control under various complex conditions, improving stability and agility.
Path planning algorithms: Path planning is key for autonomy and obstacle avoidance. Techniques such as genetic algorithms and artificial potential fields improve autonomous flight performance and safety. These algorithms enable UAVs to find efficient, collision-free paths in complex environments.
Development of intelligent operation algorithms
Image recognition algorithms: UAVs use image recognition to identify ground targets in real time for tracking, monitoring, and analysis. Integrating deep learning and convolutional neural networks improves recognition accuracy and latency, supporting applications in security, inspection, and other domains.
Perception and decision-making algorithms: Perception and decision-making enable autonomous navigation and intelligent operation. Machine learning and reinforcement learning techniques allow UAVs to plan routes, avoid obstacles, and execute missions autonomously, increasing operational scope and efficiency.
Applications and swarm capabilities
Autonomous flight: Flight control algorithms combined with sensor data enable autonomous takeoff, waypoint navigation, and landing, improving flexibility and safety.
Target tracking: Combining image processing and deep learning enables real-time identification and tracking of targets such as vehicles and people, useful for reconnaissance, surveillance, and search-and-rescue tasks.
Swarm coordination: Distributed control and wireless communication enable coordinated flight of multiple UAVs for tasks like search-and-rescue and area monitoring. In 2023, a vendor introduced swarm features for multirotor formations that support clustered networking, multiple formations, in-flight role switching between leader and follower units, and simulated flight-control-in-the-loop testing. These capabilities support coordinated multi-UAV operations while maintaining predefined formations during short communication interruptions.
Future directions
Reinforcement learning: Reinforcement learning, which optimizes control policies by trial and error, can further improve autonomous decision-making and control in UAVs.
Safety and robustness: Enhancing UAV safety and robustness is a key direction. Flight control algorithms should handle faults and uncertainties via fault detection, fault-tolerant mechanisms, and adaptive control to ensure reliability under diverse disturbances.
Intelligent decision-making and planning: As UAV applications expand, flight control algorithms need more advanced decision-making and planning capabilities. In complex environments, UAVs must make intelligent route and mission decisions to achieve efficient and safe operations.
With ongoing innovation, drone flight control algorithms are expected to increase UAV autonomy, perception, and safety, promoting broader application across industries.


