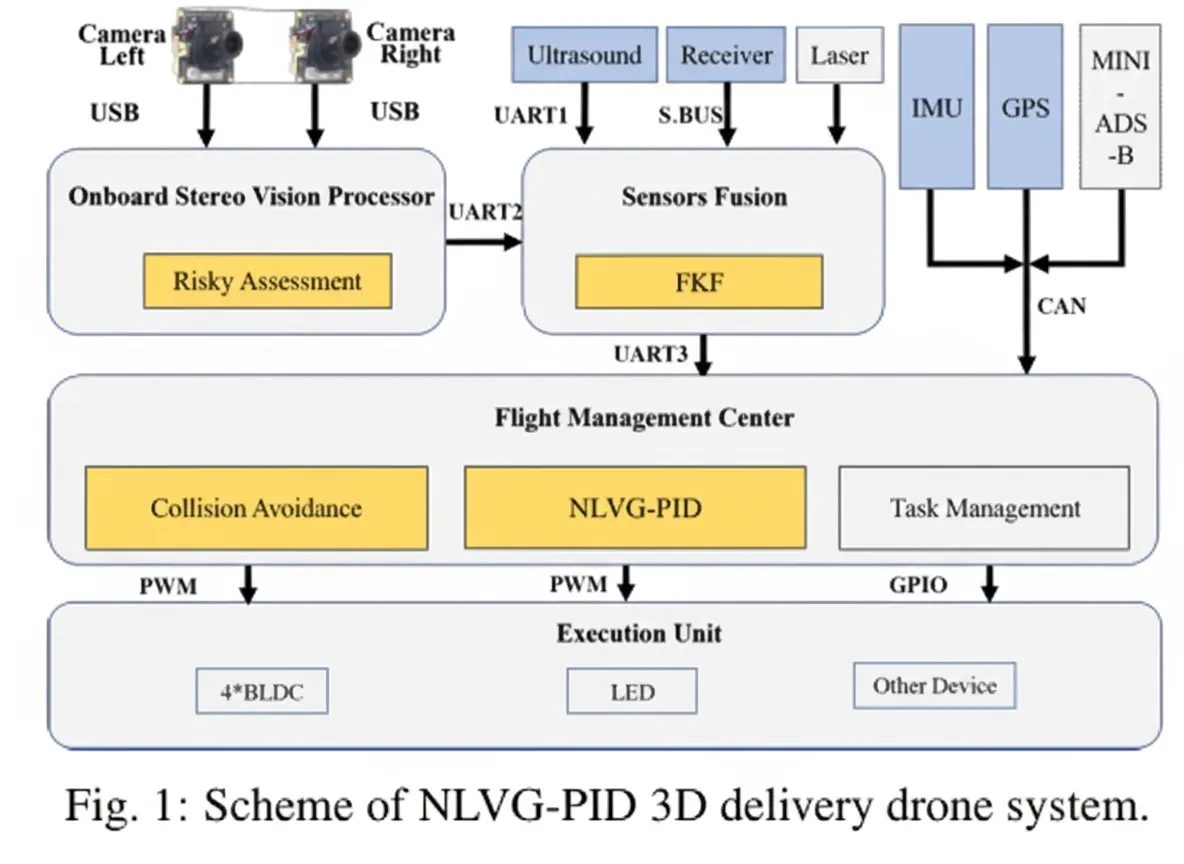
Overview
This article examines trajectory control for quadcopters performing obstacle avoidance. The authors propose a low-cost adaptive learning controller that combines a nonlinear variable-gain PID (NLVG-PID) structure with an extremum-seeking (ES) algorithm to adapt controller gains under uncertainty. The ES algorithm learns optimal NLVG-PID parameters offline using step error signals. Numerical simulations show the adaptive controller reduces overshoot and settling time on representative 3D paths such as a storm-type trajectory.
Paper Details
Title: Low-cost adaptive obstacle avoidance trajectory control for express delivery drone
Authors: Yanhui Zhang, Caisheng Wei et al.
Affiliations: School of Aeronautics and Astronautics, Zhejiang University, and others
Abstract
The paper addresses obstacle avoidance trajectory control (OATC) for quadcopters used in parcel delivery. It introduces a new nonlinear adaptive learning controller that is low cost and applicable to drones with varying wheelbase sizes, accommodating aggressive maneuvers and payload changes typical of delivery tasks. The controller integrates a nonlinear variable-gain (NLVG) function with an extremum-seeking (ES) algorithm to reduce overshoot and settling time. Simulation results on a quadcopter validate the controller on two representative collision-free trajectories.
Visual Results
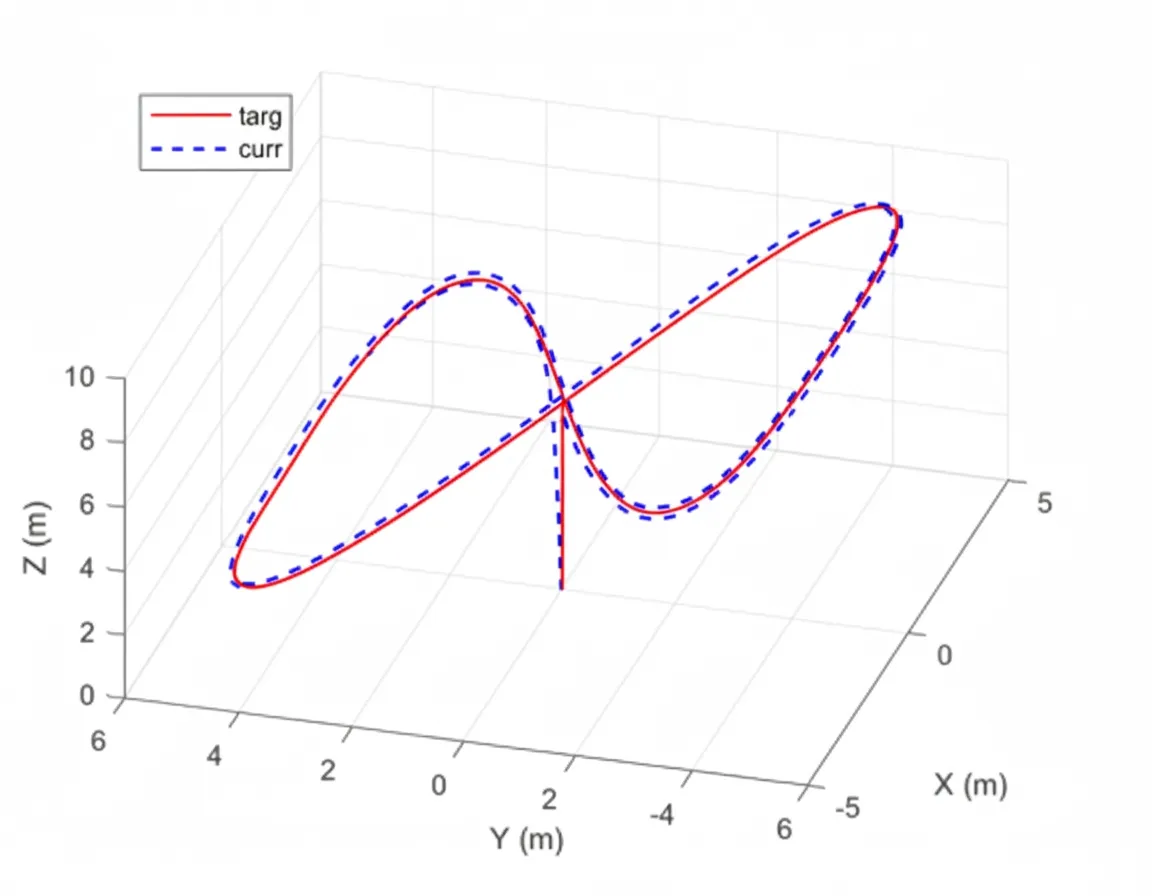
Storm-type obstacle avoidance path, 3D view.

Storm-type obstacle avoidance path, X-Y view.
Lissajous-type path, 3D view.
Main Contributions
- Analyzed the limitations of fixed-gain PID controllers in the presence of nonlinear dynamics and motion models.
- Designed an NLVG-PID controller tailored for delivery quadcopters and applied an extremum-seeking method to learn optimal nonlinear PID parameters under boundary conditions. According to the authors, this is the first NLVG-PID obstacle avoidance controller proposed for delivery drones.
- Validated the proposed control scheme with simulation experiments on two representative collision-free trajectories.
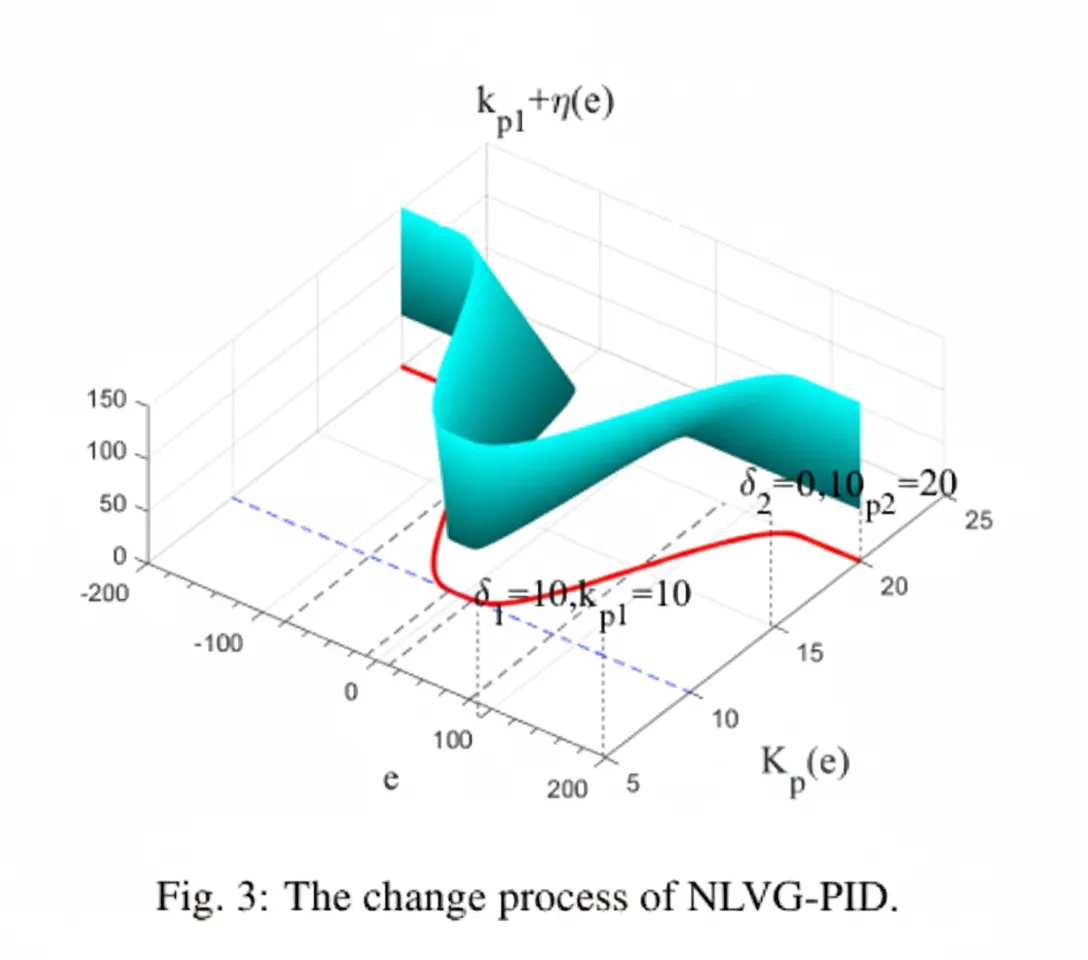
Control Concept
The core idea is a nonlinear adaptive learning controller that combines an NLVG function with an ES algorithm. The NLVG function replaces the fixed gains of a conventional PID controller to enable faster, more appropriate responses for a range of error magnitudes. The ES algorithm learns the best nonlinear PID parameters offline using maximal or minimal error step signals. Together, these elements allow the controller to adapt to large-angle maneuvers and payload variations common in delivery drones, improving tracking and reducing transient overshoot.

Experimental Results
Simulation experiments demonstrate the effectiveness of the NLVG-PID controller for quadcopter obstacle avoidance. Key findings:
- Storm-path tracking: The NLVG-PID controller achieves faster convergence to the desired trajectory in attitude and position compared with a fixed-gain PID. It exhibits improved robustness under dynamic disturbances, with reduced Euler angle and position errors.
- Lissajous-path tracking: On a 3D Lissajous trajectory, the NLVG-PID controller maintains fast and stable tracking despite increased path complexity, effectively controlling attitude and position errors.
Conclusion and Future Work
This work addresses active motion control for quadcopter obstacle avoidance by proposing a low-cost adaptive learning controller based on dynamic linear optimization under uncertainty. The design integrates an NLVG-PID controller with an ES algorithm to learn optimal nonlinear PID parameters offline. Numerical simulations indicate the approach reduces overshoot and settling time on typical 3D trajectories such as storm paths. Future work can focus on hardware validation, real-world disturbance tests, and extending the method to multi-agent coordination.


