Near-field EMI Testing for Drone Platforms
Practical analysis of drone EMC and EMI sources, near-field testing methods, and mitigation techniques including spread-spectrum clocks and BDL filters for flight controllers.
Practical analysis of drone EMC and EMI sources, near-field testing methods, and mitigation techniques including spread-spectrum clocks and BDL filters for flight controllers.
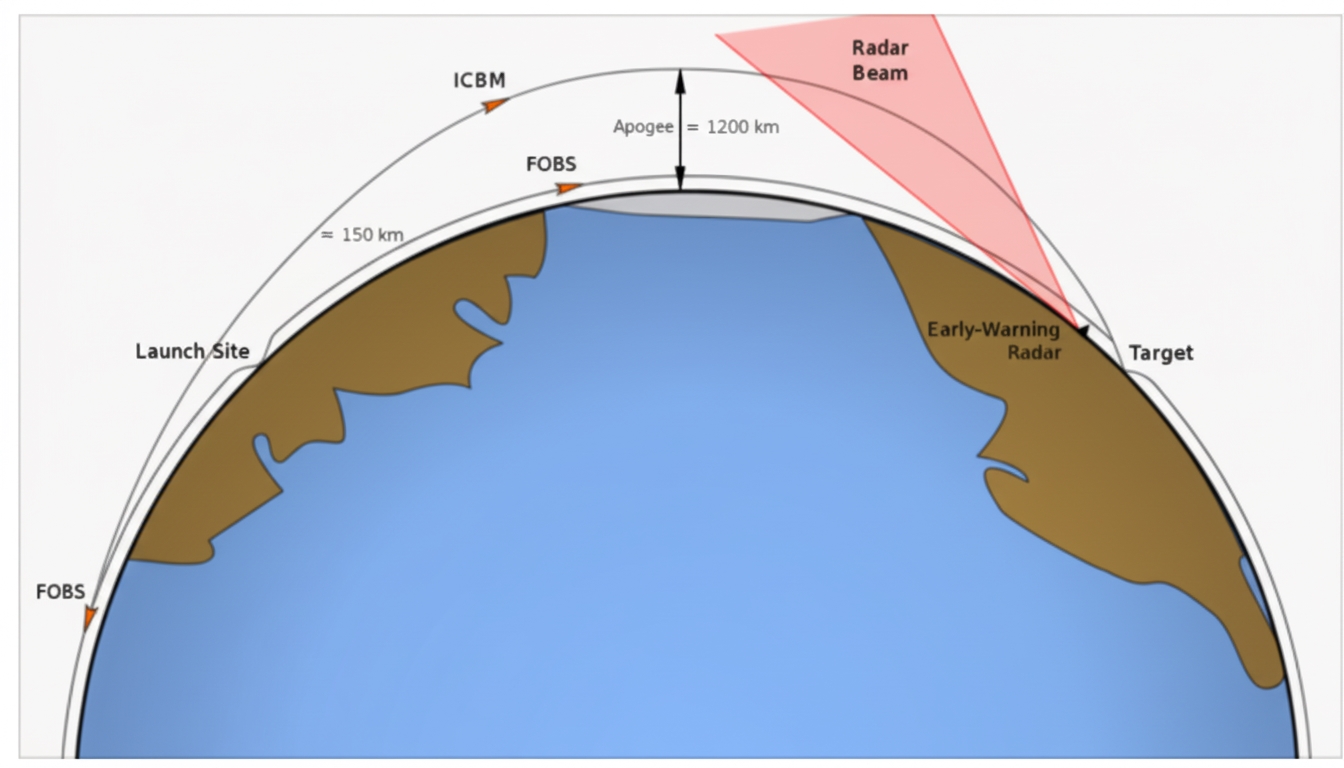
Technical overview of Cold War-era space weapons and concepts, covering space lasers, orbital nuclear/ASAT proposals, SDI, Polyus, kamikaze satellites and debris risks.
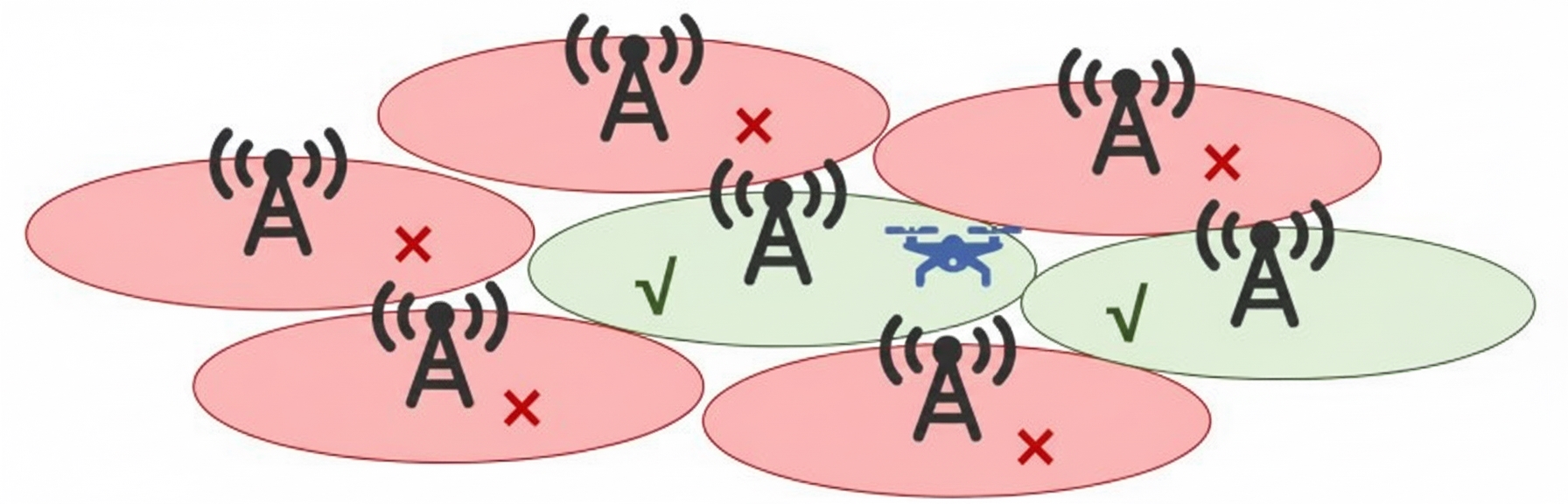
Overview of 5G drones: how enhanced bandwidth, precise positioning and edge computing expand inspection, emergency response, logistics, autonomy and swarm coordination.
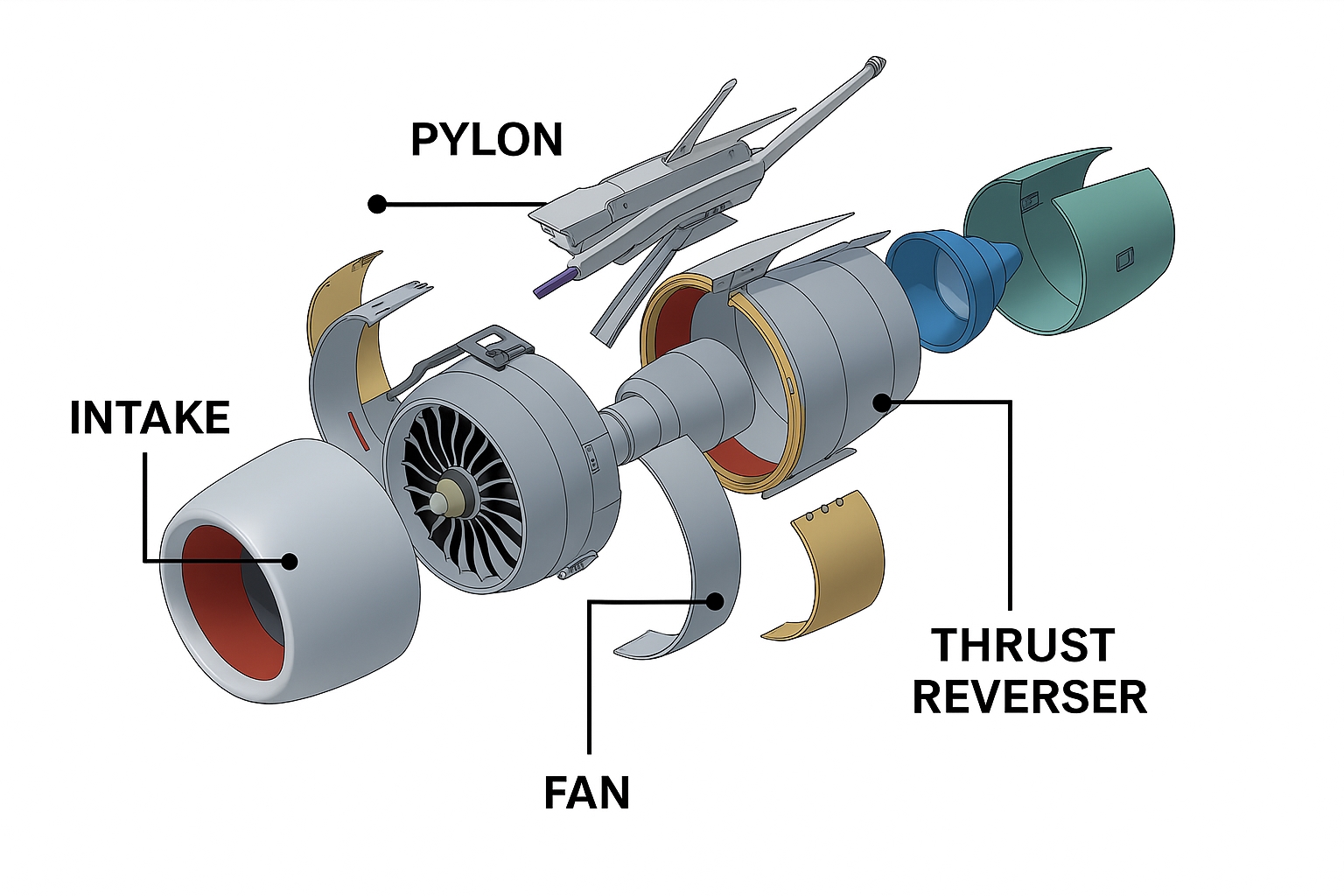
Overview of thermoplastic composites for aircraft engines and nacelles, covering PEEK/PPS prepregs, AFP forming, material properties and engineering applications.
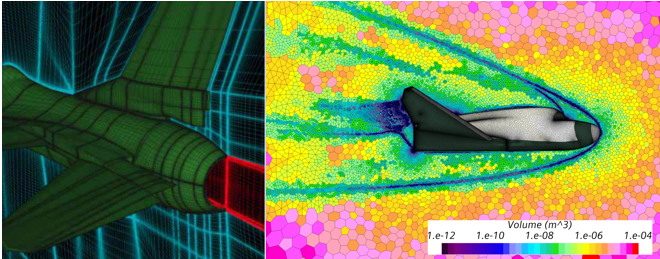
Practical insights on aerodynamic layout design and CFD-based simulation, with guidance on testing, meshing, solvers, and recoverable launch-vehicle aerodynamics.
Analysis of the SHiELD airborne laser pod program: progress, power/thermal and beam-control challenges, and near-term feasibility for fifth-generation fighters.
Technical overview of aerial refueling and tanker design: conversion hurdles, hose-and-drogue vs. flying boom methods, operational risks, and future automation.
Overview of drone inspection functions and application modes in oil and gas operations, covering leak detection, safety monitoring, imagery, pipeline and offshore inspections.
Technical overview of DRDO's SWiFT demonstrator and its role in developing the Ghatak UCAV: flying-wing aerodynamics, indigenous avionics, landing gear, propulsion and flight tests.
DRACO program testing nuclear thermal propulsion: overview of agency roles, NERVA history, and engineering challenges for reactors, turbopumps, and heat exchangers.
Comprehensive technical overview of missile guidance systems and seekers, covering active/semi-active radar, anti-radiation, infrared seekers (IIR), laser/lidar and receivers.
LiDAR moving object segmentation method that fuses current scans and a local map into a Volumetric Belief using 4D convolutions and Bayesian fusion to refine dynamic maps.