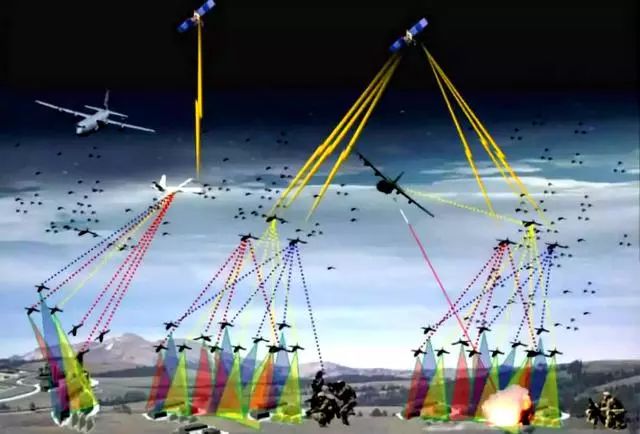
Micro drones have broad potential for military applications. A swarm of thousands of drones operating as a coordinated formation could increase combat capability by orders of magnitude. Such a swarm can provide wide-area reconnaissance and surveillance, interconnect rapidly among individuals and with rear command-and-control centers, and operate as a densely distributed combat formation. Some drones can carry small explosive payloads to destroy targets, enabling strike operations.
Recently, a research institute of China Electronics Technology Group conducted flight tests and validation for a land-air coordinated drone swarm system. What is a drone swarm? In essence, a drone swarm is a group of drones with partial autonomy that, assisted by manned or unmanned control devices, perform real-time data communication, multi-aircraft formation flying, and collaborative missions under operator guidance, including battlefield reconnaissance, ground strike, air-defense suppression, electronic warfare, decoy operations, and communications relay. Like natural swarms, they combine large numbers with division of roles.
In the announced tests, the swarm launched from the ground and was also deployed from air platforms. From published video, the ground launcher uses a 48-tube rapid-launch device that can send large numbers of drones into the air in a short time. In the air, helicopters can hover and release drones that deploy parachutes for deceleration and stabilization before transitioning to flight. Reportedly, the system can launch up to 200 drones in a single salvo, forming a large swarm to multiply strike effects. The trial appears to be practice-oriented, suggesting that if China's first operational drone swarm completes testing, it may enter service in the near term.
The U.S. response to these developments highlighted the operational implications. An analysis in U.S. media noted that the videos show a system that appears mature, particularly the mobile ground launcher, and argued that even if full swarm-operational capability is not yet in place, deployment is approaching reality. Swarms launched from multiple platforms, both ground and air, can approach target areas from many directions, increasing flexibility and resilience. A key concern is that swarms are inherently difficult to defend against; saturation attacks can degrade or overwhelm air-defense systems, and current short-range air defenses may struggle to intercept such swarms effectively. This assessment illustrates the disruptive potential of drone-swarm technology.
Already in 2016, the U.S. military tested swarm release from F/A-18 Super Hornets. Three F/A-18s released 130 "Quail" micro-drones that formed a coordinated swarm and flew safely to designated positions. That experiment indicated the U.S. had demonstrated swarm control capability. Although swarm tactics appear simple, they rely on multiple advanced technologies. The integrated system typically depends on six core technical areas, described below.
1. Swarm control algorithms
To achieve coordination among many drones, the logical and physical information and control relationships between drones must be defined. Architecture research that combines system structure and control ensures smooth information and control flows and provides a framework for inter-drone interaction. Swarm control algorithms must support effective cooperation and be independent of swarm size, allowing drones to join or leave the formation without affecting the overall control architecture.
Suggested Reading: How Distributed Drone Swarms Work
2. Network communication design
In a self-organizing multi-drone system, each drone acts as a node within a distributed communications network. The spatial distribution of these nodes determines the overall network topology, and different topologies lead to markedly different communication performance in terms of latency, bandwidth, robustness, and anti-jamming capability. To support such dynamic networking, each drone integrates communication, navigation, and control electronics built on ruggedized military PCB, which provide stable RF performance and reliable interconnects under vibration, shock, and electromagnetic interference.
3. Coupling of control algorithms and communications
Drones exchange information to improve the efficiency of coordinated tasks. Timely and complete transmission imposes requirements on the communication network. Communication-quality-constrained cooperative control methods are designed to operate under current quality-of-service constraints, so that drone trajectories meet mission needs while the constructed communication network supports timely and complete data transfer, thereby improving overall coordination efficiency.
4. Task planning
Effective task coordination requires a distributed architecture for self-organizing cooperative missions that does not depend on swarm size. Basic behaviors and simple tasks are handled autonomously by individual drones. For complex or collaborative tasks, a drone can publish task information and resource requirements to the network, and other drones respond according to their current tasks and resource availability. This approach allows drones to join or leave without disrupting system organization.
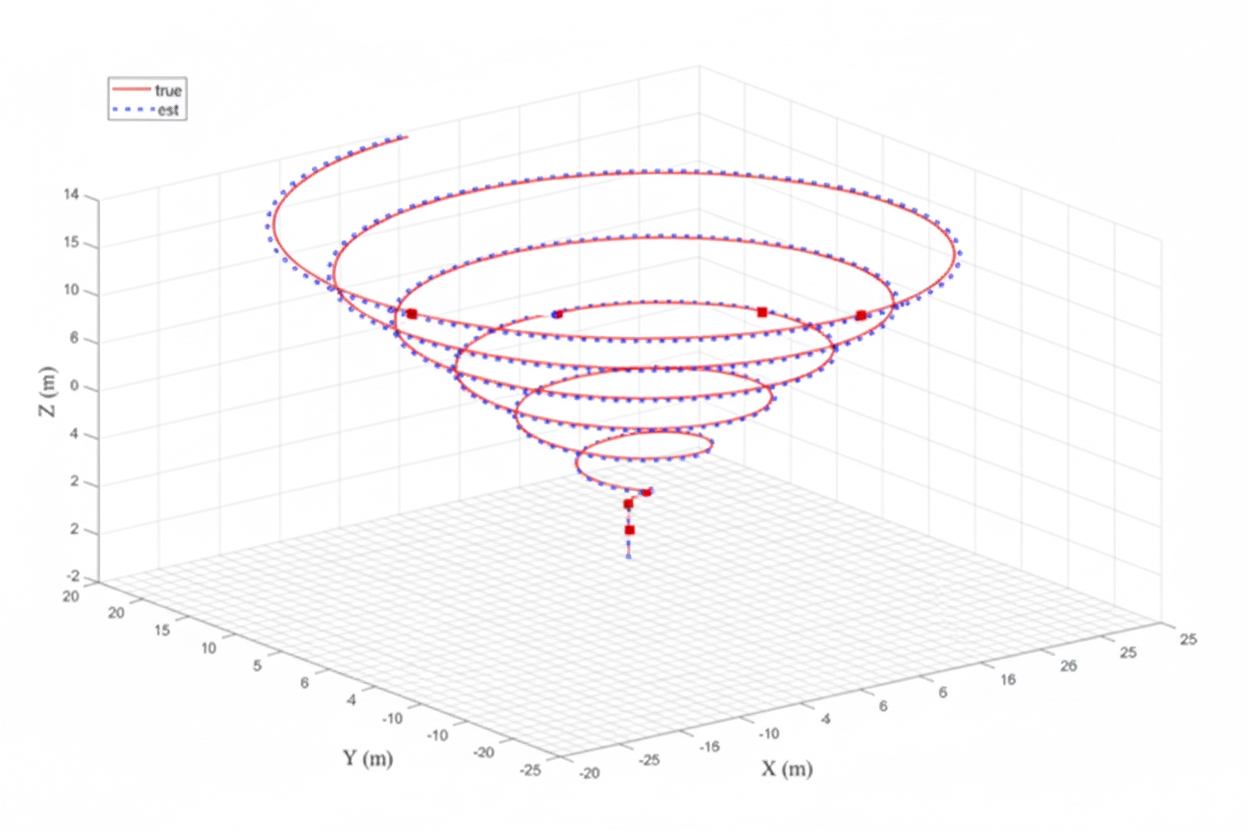
5. Path replanning
If unforeseen events occur during flight, drones must replan trajectories to avoid danger or adapt to changing requirements. To meet the real-time needs of cooperative operations, replanning algorithms must be efficient. A targeted search approach inspired by swarm algorithms can treat segments of a reference trajectory where threats appear as local search regions, avoiding a global search of the entire trajectory. This enables rapid generation of corrected trajectory segments to replace threatened portions. During flight, drones can continuously update reference trajectories based on received threat information until the target is reached.
6. Formation control
From a modeling perspective, a formation of drones maintaining specified spatial separation can be treated as a high-order multi-agent identification and time-varying formation control problem. The control challenges are significant, and communication delays further complicate formation analysis.
Drone swarms can threaten carrier strike systems
Summary
Drone swarm technology is developing rapidly. As autonomy improves, swarm-based architectures are likely to become a major trend in unmanned systems. Swarm combat concepts represent a new operational mode that could have disruptive effects on future conflict dynamics.