Introduction
Cross-border cooperation, interconnection, and automated mobility (CCAM) along European routes requires unified solutions that support cross-border traffic. When vehicles cross national borders, there is substantial commercial potential in providing CCAM services across countries. Delivering seamless, continuous, real-time services in border regions creates technical challenges that 5G technology is expected to address. The cross-border setting is especially challenging due to multiple countries, multiple operators, multiple telecom vendors, multiple automotive OEMs, and cross-generation equipment.
The 5GCroCo project, with a total budget of approximately EUR 17 million and partial funding from the European Commission, aims to validate 5G technologies along the Metz–Merzig–Luxembourg cross-border corridor traversing France, Germany, and Luxembourg. The 5GCroCo validations focus on three use cases: 1) teleoperated driving, 2) HD map generation and distribution for automated vehicles, and 3) anticipated cooperative collision avoidance (ACCA). The results will help reduce uncertainties around cross-border eV2X communication and prepare for commercial 5G deployment.
This article is organized as follows. Section II summarizes the main goals of 5GCroCo. Section III describes the use cases to be evaluated. Section IV outlines the key CCAM enabling technologies to be validated. Section V presents trial sites for small- and large-scale tests. Section VI discusses business models and cost/benefit analysis. Section VII concludes.
II. 5GCroCo Project Overview
5GCroCo is an innovation action partially funded by the European Commission under the 5G Public-Private Partnership (5G-PPP). The project is dedicated to large-scale 5G technology trials for CCAM along a European 5G cross-border corridor connecting Metz (France), Merzig (Germany), and Luxembourg. In addition to the large-scale corridor trials, 5GCroCo will run small-scale pilots at testing platforms such as Barcelona, Montlhéry-UTAC, Munich, and the German A9 motorway 5G-ConnecTedMobility platform. The project has a planned duration of three years from 1 November 2018 to the end of October 2021. It is coordinated by the Telecommunications Research Center Catalonia (CTTC) in Castelldefels, Spain, and brings together 24 partners from seven European countries, including key organizations from telecom and automotive sectors. Partners include leading OEMs, tier-1 suppliers, road authorities, mobile network operators, telecom vendors, SMEs, and academia.
The project trials focus on three CCAM-related use cases: teleoperated driving, HD map generation and distribution for automated driving, and ACCA. The following section provides further details on these use cases.
III. 5GCroCo Use Cases
5GCroCo aims to validate three key CCAM services: 1) teleoperated driving, 2) HD map generation and distribution for automated driving, and 3) ACCA. The project concentrates on these high-potential use cases to derive recommendations and insights applicable to a broader set of CCAM scenarios.
A. Teleoperated Driving
Teleoperated driving is defined as remote control of an automated vehicle by a human or an artificial intelligence agent over a mobile radio network. 5GCroCo focuses on human remote operators. In automated driving contexts, teleoperation can be applied in situations such as:
- Remote lane change or speed adaptation on motorways: when a driver of a level 3--4 automated vehicle needs to regain control, a remote operator can take control from a remote operations center with sufficient time.
- Transition from highway to urban driving: a vehicle may handle highly automated driving on motorways but not in urban streets (level 4). Rather than asking an onboard driver to take over, teleoperation can be used to reach the final destination, enabling journeys where a legally licensed driver is not present, for example for underage passengers.
- Unresponsive driver: if a level 4 vehicle cannot handle all situations and a driver does not respond to a takeover request, a remote operator in the driving operations center can assume control.
- Undefined traffic situations: when fully automated vehicles (levels 4--5) cannot handle specific traffic conditions, teleoperation allows a remote operator to assist by providing extra information or temporarily taking control to resolve the situation or propose a new route.
This use case creates several network challenges, notably high uplink bandwidth for video streams and capacity to control multiple vehicles in a region. A further challenge stems from the high risk associated with requests for remote takeover: multiple vehicles in the same area may simultaneously request service. Network infrastructure and backend application servers required to run this use case may belong to different administrative domains, for example different MNOs. End-to-end QoS must be preserved across these domains, including when crossing national borders. Network design must provide the required QoS and ultra-high reliability. Predictive QoS is needed to warn in-vehicle occupants and remote operators of expected QoS degradation. Possible mitigation actions depend on the scenario and automation level and may include deceleration, routing to a path that the network can support, or a safe stop. On top of predictive QoS, safe remote control requires an overall functional safety concept that considers in-vehicle architecture, advanced 5G communication network architecture, and backend architecture.
B. HD Map Generation and Distribution for Automated Driving
Intelligent, dynamic HD maps provide highly accurate positions of static and dynamic objects and traffic information, enabling autonomous or semi-autonomous vehicles to select optimal routes and lanes. Such maps are built by fusing all available data from diverse sources along the road, for example vehicle-shared sensor data, data from roadside infrastructure, and map provider data.
5GCroCo will define how the data required to generate HD maps are exchanged and structured between vehicles, data servers, and map providers. The focus will be on three specific scenarios and applications:
- Large-scale route optimization for automated vehicles: detailed route planning is essential and includes large-scale planning to estimate the optimal path from origin to destination.
- Small-scale vehicle planning and execution, such as selecting the correct lane: specific locations like roundabouts, tunnels, or bridges require detailed handling. In these cases, HD maps should aid route and vehicle planning with high positioning accuracy.
- Route updates in hazardous situations: automated vehicles should avoid being trapped in queues caused by accidents, congestion, or other hazards by switching to an alternative route before reaching the destination; this requires up-to-date maps fed by vehicle sensors or roadside infrastructure notifications to recompute the optimal path.
C. Anticipated Cooperative Collision Avoidance (ACCA)
On motorways, standalone onboard sensors (radar, cameras, lidar) may not always detect and localize hazardous events in time to avoid emergency braking or collisions, depending on friction conditions. 5GCroCo will define and test cooperative solutions to predict detection and localization of such hazards, enabling smoother, more uniform vehicle responses. ACCA is useful in cases such as:
- Temporary static events like traffic jams.
- High deceleration, emergency braking, or unexpected maneuvers by a vehicle ahead (visible or not to the subject vehicle).
- Cut-in anticipation when a vehicle suddenly moves into another lane.
Cooperative vehicles or roadside infrastructure will upload a set of information to specific servers, such as status (position, speed, acceleration), detected events, and some sensor data (camera or radar streams, or any standardized cooperative perception information). Local servers, such as MEC servers, will use these data to create an out-of-vehicle dynamic map that integrates all collected information based on known road topology. Distributed out-of-vehicle services are used to:
- Aggregate and integrate vehicle data with data from road operators.
- Independently manage dynamic information by vehicle or geographic area, especially in congested regions.
- Infer relevant content for specific users from distributed dynamic maps.
- Ensure handover of workload between neighboring MECs.
- Ensure roaming across countries and mobile network operators.
IV. 5G Technologies in 5GCroCo
5GCroCo has identified a set of key 5G technologies that will enable CCAM. Many of these technologies have been thoroughly evaluated in past and ongoing research and innovation projects, and some have seen commercial deployment. 5GCroCo aims to demonstrate their effectiveness in cross-border, multi-MNO, multi-vendor, and multi-OEM deployments, with service continuity being a particular objective. Identified key technologies include:
- Distributed computing based on mobile edge computing (MEC).
- Predictive QoS.
- End-to-end QoS using network slicing.
- Precise positioning supported by the mobile network.
- Security.
The V2X services to be studied and trialed for the use cases described above have unique characteristics that make the use of these technologies particularly relevant. First, the scope of interest is often limited: information typically needs to be close to where it is generated. This applies to HD map generation and ACCA, making a MEC-enabled cellular network a key part of the V2X architecture.
A second unique aspect is the multi-OEM and multi-MNO challenge. For typical mobile radio services such as voice and data, peering points between MNOs and vehicle clouds can be distant from the network edge. In a MEC-enabled V2X architecture, this issue must be addressed so that solutions do not rely on a single MEC provider.
A third aspect is the role of road authorities as another information source and recipient. Road authorities often use closed, sometimes proprietary IT systems that need integration into a distributed computing V2X architecture supporting MEC. Crossing national or regional borders introduces new road authorities with their own IT infrastructures.
Using these technologies, 5GCroCo will address gaps in current cellular V2X technologies (for example LTE Release 14) and enhance key 5G performance indicators such as latency, reliability, and packet error rate, even under cross-border, multi-MNO, multi-OEM, and multi-vendor operations. The following subsections elaborate on the challenges each technology addresses.
A. MEC-based Distributed Computing
Mobile edge computing (MEC) typically refers to compute resources shared with one or more base stations. The MEC definition in 5GCroCo is not strictly limited to MEC geographic location, but to MEC instances where applications running on them exhibit very low latency between associated base stations. Local MEC instances serving limited geographic areas combined with vehicle mobility cause frequent changes in the MEC instance handling a particular vehicle, i.e., MEC handover. 5GCroCo will define a generic MEC-enabled distributed computing architecture and best practices to deploy microservices needed for the three project use cases and other V2X services. The goal is to balance network performance with deployment complexity and cost.
B. Predictive QoS
In situations affecting life safety, availability or performance degradation may be tolerated only by trading off other factors. In a V2X context, this can mean increasing inter-vehicle distances, reducing throughput, or stopping vehicles. The communication system state must be monitored, faults detected, and applications/services informed. Prior research has shown that instantaneous network fault notifications are often insufficient to guarantee functional safety. Vehicles may need time to enter safe states and may rely on communication during the transition, such as notifying surrounding vehicles or querying application services about the best safe state achievable under current conditions.
5GCroCo aims to expand predictive QoS from the radio access network to an end-to-end assessment. Redundancy is key for reliable communication and will be evaluated across RAN, core, and backend, emphasizing how MEC-enabled distributed computing can ensure redundancy, failover, and fast recovery. The project will extend the network to enable highly reliable QoS prediction at specific locations. Existing predictive QoS algorithms will be evaluated in real scenarios to determine performance and suitability, and foundational interfaces and architecture will be developed for cross-border and cross-MNO predictive QoS.
C. End-to-End QoS Network Slicing
Network slicing allows MNOs to instantiate one or more virtual networks. While standards such as 3GPP Rel.15 and ETSI MEC and data center technologies enable flexible instantiation of multiple logical networks on shared infrastructure, questions remain about how many and which slices to deploy and when. 5GCroCo will address this by considering the full solution space, ranging from no dedicated V2X slices to fine-grained differentiation where almost every service might have one or more dedicated slices, as could be the case for each of the three use cases. The practical solution will lie between these extremes and depend on each MNO's current and planned infrastructure.
D. Precise Positioning Supported by the Mobile Network
Advanced ITS services developed in 5GCroCo for cooperative, connected, and automated vehicles require centimeter-level accuracy. Current GNSS cannot reliably provide such precision, especially in urban canyons. 5GCroCo will design and validate innovations to deliver centimeter-level positioning supported by the 5G network. The project will take a holistic approach to positioning, considering RAT-dependent and RAT-independent methods as well as hybrid approaches. For RAT-dependent methods, 5GCroCo will study physical-layer extensions to 5G NR that allow user equipment to obtain the required precise position.
E. Security
A key objective of 5GCroCo is to ensure state-of-the-art security across all involved IT infrastructures. The overall architecture, communication protocols, software, and hardware should implement appropriate measures to maintain confidentiality, integrity, availability, and authenticity. Strict adherence to GDPR data privacy requirements is also essential.
Throughout the project phases, security aspects including privacy, confidentiality, integrity, availability, and authenticity will be evaluated. Privacy is a particular concern due to V2X-specific challenges. Existing 3GPP security mechanisms will be assessed and gaps identified. Solutions to address those gaps will be defined, preferably relying on standard Internet or C-ITS specific mechanisms as defined by IETF, ETSI ITS, and other SDOs.
V. 5GCroCo Test Sites
5GCroCo will run both large-scale and small-scale trials to validate the 5G technologies described in Section IV for the three use cases from Section III, particularly under cross-border, multi-vendor, multi-OEM, and multi-MNO conditions.
A. Cross-border Corridor
5GCroCo will concentrate large-scale trials along the 5G European corridor connecting cities in France, Germany, and Luxembourg. This corridor is part of a pan-European 5G corridor network facilitated by regional agreements. These agreements permit testing over hundreds of kilometers of motorway where vehicles can operate autonomously under certain driver-present conditions (level 3 automation). The corridors are supported by the European Commission as part of its 5G Action Plan to facilitate commercial 5G deployment by the end of the decade.
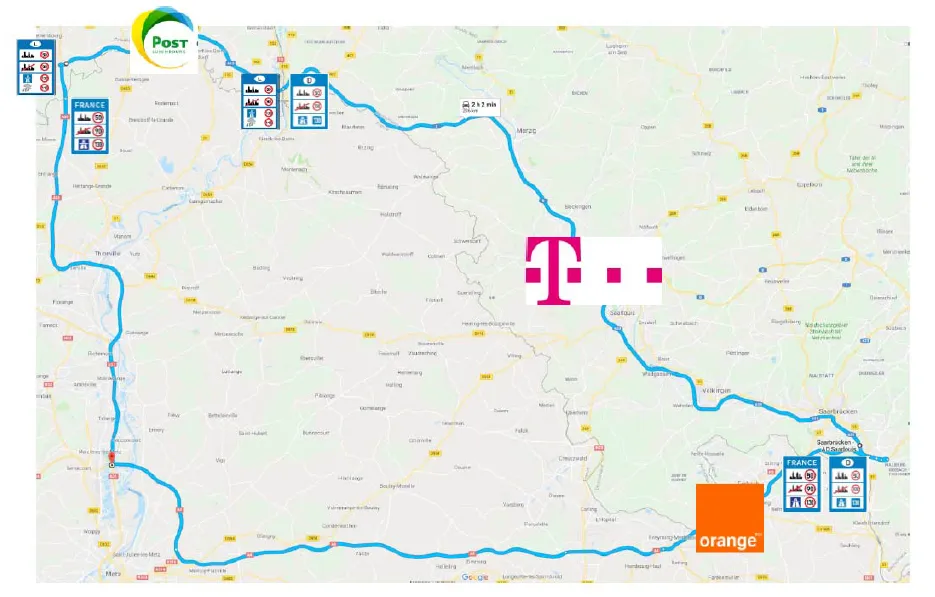
Figure 1. 5G corridor map where 5GCroCo will run cross-border CCAM 5G trials.
B. Pilot Sites
Alongside corridor-scale trials, 5GCroCo plans local pilots as a step before large-scale corridor deployment. These pilots will be deployed at Montlhéry-UTAC near Paris, two sites in Germany (a section of the A9 motorway and a test point in central Munich), and in Barcelona where a cross-border urban environment will be emulated. These pilots allow testing 5G features locally and in controlled, often closed, areas to manage the complexity of large-scale trials. The pilots enable selection and fine-tuning of 5G features for integration into the large-scale trials, reducing deployment and testing uncertainty.
C. Key Performance Indicators (KPI)
5GCroCo will continuously monitor and evaluate the performance of proposed 5G innovations using KPIs. Telecom-related KPIs include throughput, latency, packet error rate, reliability, call drop during handover, and maximum UE-supported speed. From an application perspective, use-case-specific KPIs will also be considered, such as braking time, anticipation time, and service interruption duration.
VI. Business Innovation in the New Automated Driving Ecosystem
Beyond CCAM 5G trials, researching and defining new business models and cost/benefit analyses is a core element of 5GCroCo to understand the commercial potential of cross-border CCAM services. The ability to operate advanced 5G features across borders, telecom vendors, automotive OEMs, and MNOs opens a new innovation field. 5GCroCo will analyze the cost/benefit of deploying 5G in such complex scenarios and develop tools to define viable business models. This process will run in parallel with trial deployments to learn from experience, understand stakeholder needs, and reduce uncertainty in 5G infrastructure deployment for CCAM services.
VII. Conclusion
5GCroCo is an innovation action partially funded by the European Commission in which major European partners from the telecom and automotive industries collaborate to validate 5G technologies at scale in a cross-border setting. The project aims to reduce uncertainty ahead of market introduction of CCAM services running on 5G communication infrastructure.
5GCroCo also aims to identify commercial opportunities and define new business models for disruptive CCAM services enabled by 5G, and to ensure appropriate influence on relevant telecom and automotive standardization bodies. 5GCroCo is a key element of the 5GIA trial roadmap strategy v2.02, aligned with the European 5G Action Plan, and intends to contribute to and synchronize with the broader 5G-PPP ecosystem.