Editor’s note
As human activities extend deeper into the oceans, innovation in sea-based communication networks is increasingly important. Seawater is a conductive medium, and selecting suitable carriers for information transmission is critical. Currently, acoustic waves remain the best choice overall, outperforming radio, low-frequency electromagnetic waves, and optical waves in most underwater scenarios. Researchers have achieved numerous scientific and technical breakthroughs in sea-based communication since the 20th century. Progress in communication technologies, especially 6G research, creates new opportunities for innovation in sea-based networks.
A research team led by Academician Yuanliang Ma at the Chinese Academy of Engineering published a paper in the journal Engineering (2022, 8(1):12-17) that proposes an integrated air-surface-undersea sea-based network concept for future 6G development in underwater environments. After reviewing operational requirements, technological bottlenecks, physical findings, breakthroughs, and interdisciplinary integration, the paper summarizes and analyzes the current state and potential of marine wireless communication. It discusses future development concepts and key elements such as channel exploitation, diverse mobile platforms, and network organization, providing in-depth analysis for each application scenario. By combining radio and acoustic communication advantages, the paper proposes a new concept of a cross-medium "data bridge" between the ocean and the atmosphere, and suggests feasible approaches. Analysis indicates that unifying atmospheric-surface-subsea networks via such data bridges is feasible.
1. Introduction
There is a major transmission gap between atmospheric space and underwater space for radio waves. The air-sea interface is a natural barrier that isolates radio propagation into seawater. Because seawater is conductive, radio waves suffer severe attenuation. As a result, the underwater domain lacks internet, mobile communication, high-quality video, and even reliable long-range two-way wireless communication. This is significant, as oceans cover 71% of Earth’s surface and are critical to the economy, ecology, and human survival.
It is notable that while humans have transmitted signals and images between Earth, the Moon, and Mars, close-range maritime environments remain challenging. The physical constraints of the transmission medium are the main difficulty.
Over the past century, researchers have sought effective carriers for information transmission in seawater. Currently, acoustic waves are the best overall choice; they outperform radio, low-frequency electromagnetic waves, and optical waves in many contexts. For example, medium absorption and scattering losses in seawater differ markedly by carrier: a 1 kHz ultra-low-frequency electromagnetic wave (300 Hz–3 kHz) suffers about 110 dB attenuation over 100 m; blue-green laser attenuation over 100 m ranges from 15.5 to 50.0 dB; a 1 kHz acoustic wave suffers about 7 dB attenuation over 100 km. If propagation paths are entirely within seawater, acoustic propagation distance can exceed that of the other carriers by more than three orders of magnitude.
Therefore, discussions of underwater communication and networking primarily focus on underwater acoustics, including fundamental acoustic physics and engineering technologies related to underwater sensor networks and sonar. Electromagnetic and optical methods, as well as approaches from biology, radiology, and hydrodynamics, can only serve as complements to acoustic technology.
2. Demand Drivers for Marine Information Technology Innovation
Innovation arises from demand pull and technology push. Demand pull involves human and market needs, while technology push involves opportunities created by scientific discovery and technical progress. Marine industry and economic demands are large, as the following data show.
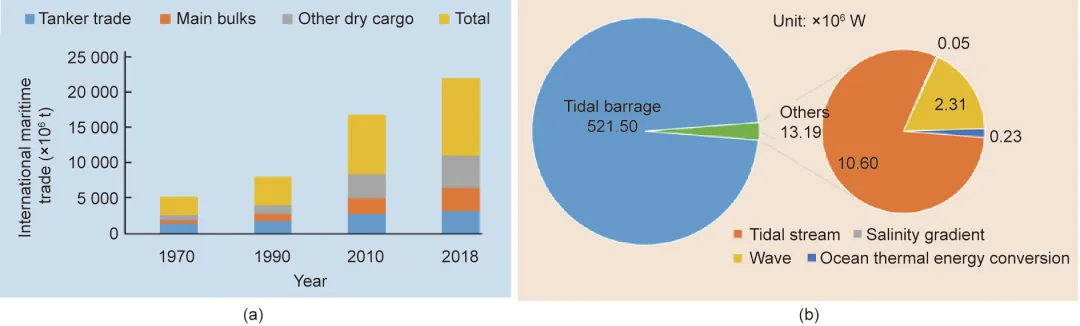
Figure 1. Demand data for marine technology innovation. (a) International maritime trade growth over the past 50 years, data from UNCTAD. (b) Current marine energy deployment and cumulative installed capacity; total installed capacity for all marine energy technologies is about 5.4 × 10^8 W, data from IRENA.
Global seaborne cargo in 2018 was 1.1 × 10^10 t, about 1.4 t per person on average. Shipbuilding, port management, transport safety and security, and associated initiatives drive electronic commerce, the Internet of Things, blockchain, and artificial intelligence.
Oil, gas, and mineral exploration and extraction (including manganese nodules and gas hydrates) support large marine industries and promote automation, robotics, underwater surveillance, and sea-to-air data transfer technologies.
Marine fisheries and aquaculture are extensive and provide significant nutrition; global annual catch is about 8 × 10^10 kg, around 10 kg per person. Aquaculture drives advances in water quality monitoring, fish-finding, localization, and catch assessment.
Offshore renewable energy, such as wind power, is rapidly developing. To minimize impacts on densely populated coasts, farms are often located tens to hundreds of kilometers offshore, requiring advanced mechanical and digital engineering to withstand harsh marine environments.
Submarine cables spanning continents support a large-scale wired data system; roughly 378 submarine fiber-optic cables totaling about 1.2 × 10^6 km carry 99% of transoceanic data. State-of-the-art cables support up to 200 Tbps. Cable construction and maintenance are costly and complex, and require measures to prevent eavesdropping and data leakage.
Marine science, the human living environment, and defense R&D are also critical. Ocean-atmosphere and ocean circulation influence weather, climate change, and disasters. Pollution, acidification, biodiversity protection, anti-smuggling, and migration-control requirements create further technical challenges. In defense, a wide range of platforms and systems form a large marine defense industry, including ships, submarines, AUVs, shipborne UAVs, sensors, underwater weapons, and C4ISR facilities.
This article does not discuss all aspects of marine industry demand in detail, but emphasizes the scale and diversity of marine economic needs and the strong, practical demand for innovation in both current 5G and future 6G mobile communication technologies.
3. Innovation Opportunities for Sea-Based Communication Networks
Sea-based communication networks fall into several distinct categories: wired systems (submarine cable systems, ship and port fiber networks); surface radio systems (platforms above the surface connecting ships, buoys, USVs, airborne platforms, coastal stations, and satellites); non-acoustic remote communications (laser and electromagnetic methods, including very low frequency and extremely low frequency command links); and underwater acoustic systems and networks. The first three categories resemble land-based systems and benefit from cross-domain technologies. This article emphasizes the fourth category: underwater acoustic systems and, particularly, wireless mobile underwater acoustic networks.
Since the early 20th century, intensive research driven by wartime and strategic needs has produced many scientific discoveries and technical breakthroughs, yet fundamental challenges remain. Future innovation momentum will come from accumulated discoveries and technological progress combined with marine economic demand.
a) Data rate, distance, and frequency coupling
Acoustic attenuation in seawater increases exponentially with frequency, so long-range use requires low frequency. Lower frequency yields lower available bandwidth and thus lower data rates. In short, higher frequency supports higher data rates at short range, while lower frequency supports longer range at lower data rates. MIT researchers Kilfoyle and Baggeroer summarized an empirical envelope stating that the product of distance and data rate approximates 40 km·kbps, assuming earlier low spectral efficiency. With improved spectral efficiency in recent years, this product can reach 100–200 km·kbps.
b) Complexity of shallow-water acoustic channels
Acoustic speed in seawater depends on conductivity (salinity), temperature, and depth (CTD). The sound speed profile (SSP) varies with depth, causing refraction and curved propagation paths. CTD varies with geography, season, meteorology, and hydrology, and changes with depth, surface waves, and currents, producing four-dimensional spatiotemporal variability in shallow-water acoustics. Rough sea surfaces produce multipath fading; complex seabed topography and sediments affect reflection and frequency response, causing time and frequency spreading and variable transmission loss. Shallow-water acoustic research focuses on field modeling and forecasting, real-time CTD sensing and data assimilation, and shallow-water communications, imaging, and self-organized acoustic networks. Progress has been made, but reliable universal solutions remain an open research area.
c) Deep-water channels for long-range propagation
In the early 20th century, researchers in the United States and the Soviet Union independently discovered a deep-water sound channel with a sound speed minimum at a certain depth (the sound channel axis). Sound propagating in this deep-sea acoustic channel can reach very distant locations due to low attenuation. In mid-latitudes, the channel axis is near 1,000 m and becomes shallower toward higher latitudes. Because surface disturbances do not affect deep sound speed distribution, the deep channel is very stable. Its limited application to date stems from engineering challenges of great depth (high pressure), lack of very low frequency high-power transmitters, and security concerns for a public channel. Given its long-range potential and recent technical advances, deeper exploitation of the deep-sea channel is promising.
d) Reliable acoustic paths
Another deep-water phenomenon receiving attention is the reliable acoustic path (RAP). This path begins near a source depth close to the surface and extends to the conjugate depth on the other side of the sound channel axis, often near the seabed. Transceivers operating at or below the conjugate depth achieve very stable transmission, low ambient noise, and reduced transmission loss. Importantly, no shadow zone forms above a RAP; a shallow source (less than 300–500 m) produces downward refraction that creates a near-surface shadow zone limiting direct detection to a few kilometers. Sensors should avoid shadow zones. Placing sensors near the conjugate depth yields broad direct-sound coverage; for mid-latitudes, the effective radius can reach about 30 km when the source is close to the surface. Chinese and US researchers have conducted encouraging RAP studies.
Another phenomenon is the convergence zone produced by repeated upward and downward refraction. If the path does not touch the seabed, it reaches maximum depth near the conjugate depth and repeats, forming a series of convergence zones with focusing gain of 5–10 dB, the first zone width being 3–5 km and spacing about 50–60 km at mid-latitudes. Convergence near the conjugate depth also produces gain. RAP-based communication can exploit convergence gain to extend range.
e) Proliferation of surface, submerged, and airborne observation platforms
Marine activities are sparse compared with land. Unlike land networks, marine networks lack continuous power and constant human intervention, and it is impossible to densely deploy base stations across the ocean. Therefore, mobile communication platforms are essential. Many low-cost, energy-efficient, compact, reliable, and easily deployable mobile platforms now exist.
On the surface, beyond anchored buoys and ships, there are wave gliders, wind- or wave-powered unmanned surface vessels (USVs), autonomous surface vessels, and self-propelled buoys. Wave gliders and energy-harvesting USVs can operate for months or transit thousands of kilometers, suitable as surface access points or relay nodes. Towed CTD systems also provide in-transit salinity-temperature-depth profiles for environmental sensing.
Underwater platforms include Argo floats, crewed and uncrewed underwater vehicles (AUVs, ROVs), drifters, anchored buoys, underwater robots, and seafloor autonomous observatories. Seafloor autonomous observatories can monitor RAPs, release payloads, exchange data, and provide battery charging. Thus, autonomous observatories play roles analogous to terrestrial mobile base stations for undersea sensing, communication, and data aggregation.
Above the surface, UAVs, helicopters, aircraft, and satellites can connect with surface nodes and become the first link between the acoustic world and the global radio world. A key point is latency: radio propagation over 1,600 km takes about 5 × 10^-3 s, while underwater acoustic latency can be as high as 1,000 s. This disparity highlights the priority of jointly using underwater and airborne paths when building marine wireless mobile networks.
4. Building "Data Bridges" to Overcome the Air-Sea Interface Barrier
Given the low data rates and high latency of acoustic channels, converting underwater acoustic data into radio signals and relaying them to atmospheric channels as soon as possible is sensible. We recommend constructing "data bridges." To be cost-effective, bridges should support medium- to long-range transmission—tens to hundreds of kilometers—reducing the number of required bridges. Sea-based networks will be sparse and heterogeneous, not dense like urban 5G/6G deployments.
a) Progress in medium/long-range underwater acoustic communication
Over the past decade, deep-sea acoustic experiments have shown medium- and long-range potential. Off California, an experiment using 1 kHz center frequency and two hydrophone receivers achieved 1,000 bps at 200 km, a distance-data-rate product of 200 km·kbps. Another experiment using BPSK modulation and virtual time-reversal equalization over a 100 Hz bandwidth (450–550 Hz) achieved 100 bps at 1,000 km. In a deep-channel experiment using near-axis transmitters and vertical hydrophone arrays, researchers achieved 400 bps at 600 km with spectral efficiency of 4 bps·Hz^-1. A basin-scale experiment using binary-phase M-sequence signals at 75 Hz center frequency, a 20-element vertical array, and time-reversal equalization achieved 37.5 bps at about 3,250 km. RAP theoretical results are promising but await experiments. These results show long-range acoustic communication is feasible, though data rates are still low. Given the sparsity of signals and channel responses, compressed-sensing techniques may further increase the distance-data-rate product.
Surface platform radio communication also faces medium- and long-range issues. VHF, UHF, and microwave line-of-sight communications are limited by Earth curvature and antenna height, typically within 40 km. Over-the-horizon methods are required. Fortunately, the air layer above the sea often forms an evaporation duct (ED) due to heat exchange and evaporation, creating refractive conditions that bend radio waves downward and create waveguide effects. The ED upper height is typically 20–30 m and depends on meteorological conditions. Theory and experiments show microwaves can propagate over hundreds of kilometers within an evaporation duct.
b) Four cross-interface "bridges"
The authors identify four promising cross-interface bridge concepts that can overcome the air-sea transmission barrier.
First, acoustic-radio buoys floating on the surface. The submerged portion carries hydrophones or arrays; the aerial portion carries radio transmitters connected by signal-processing electronics. Any surface platform with this capability can act as a bridge by converting acoustic signals to radio for atmospheric transmission. There are also small pop-up buoys stored at seafloor observatories that surface to transmit data when needed.
Second, very low frequency electromagnetic waves (VLF, 3–30 kHz). VLF is well suited for crossing the air-sea interface. When a radiator is a few meters to tens of meters below the surface, the emitted electromagnetic signal—including signals converted from acoustic data—can penetrate the interface and produce lateral surface waves that propagate horizontally in air to medium-range destinations or relay nodes. This approach does not require surface platforms, making it suitable for AUVs and other submerged platforms and avoiding acoustic interference or collisions with surface platforms. Nearshore propagation paths involving seawater, seabed, and land may permit direct delivery to shore. Other bands such as VHF and ELF have specific uses: VHF is suitable for short-range, high-data-rate carrier signals that can penetrate the interface; ELF is suitable for transmitting command signals from large land-based antennas over thousands of kilometers to surface or subsurface receivers. ELF advantages include propagation mostly in air near light speed, with only the final segment in seawater at much lower speed; even at 10 Hz, propagation speed in seawater is about 5,000 m·s^-1, so long-distance command transmission can still occur within tenths of a second, which is significant compared to acoustic delays of thousands of seconds.
Third, ocean mobile platforms. These platforms can operate at full depths to collect data from acoustic sensors and surface to transmit data by radio. Although surfacing introduces delay, batch transfer methods allow collection at high near-range rates and rapid bulk transfer once antennas clear the surface. AUVs, UUVs, ROVs, and crewed submarines can all perform this function. Laser communication offers similar use cases but requires alignment solutions.
Fourth, microwave detection of sea-surface ripples caused by underwater sound. When acoustic energy reaches the surface, it produces texture mixed with surface wave disturbances. Laboratory experiments have shown encouraging microwave detection results, and earlier tank experiments also succeeded. This method is one-way reception only. Researchers have also generated underwater sound via laser- or microwave-induced cavitation below the surface; intense heating causes vaporization pulses that produce vertical sound beams. Controlling waveform shapes remains a challenge. Another one-way method approximates vertical incidence of sound on the surface, allowing energy to enter the water through a local "transmission window." Low-frequency acoustic waves may propagate far underwater via this method. Historical reports indicate a submarine detected aircraft noise hundreds of kilometers away via deep channels, but the reverse—detecting underwater sounds directly in air—is generally impractical unless the source depth is much smaller than the acoustic wavelength. Under that condition, underwater sound can directly penetrate the interface as if a thin water layer is absent, which theory supports.
5. Outlook: An Integrated Air-Surface-Undersea Sea-Based Network
The path to an integrated air-surface-undersea sea-based network is clear.
First, communication with the deep ocean from anywhere and at any time is feasible because multiple useful channels exist, such as deep-sea channels, RAPs, cross-medium air/sea channels, and ocean mobile platforms. Proper use of these channels can reduce frequent link outages during integrated communication. For example, when connecting a surface node to a node in a shadow zone, data can be routed via a RAP to transmit to the seabed and then to the shadowed node.
Second, effective combination of acoustic and airborne radio techniques can substantially mitigate underwater high-latency and low-data-rate limitations. Once underwater data are passed to the air via cross-interface data bridges, they can benefit from much higher radio throughput comparable to 6G. Acoustic communications can also improve spectral efficiency by better exploiting channel properties and novel modulation concepts, such as orbital angular momentum modulation. Given the large data-rate difference between air and underwater links, further research is needed in data compression, file partitioning and aggregation, temporal compression and stretching, and using AUVs for bulk data transport. Breakthroughs in these areas will help integrate low-rate underwater data into high-rate aerial 5G/6G networks.
Finally, compared with seafloor networks connected by fixed cables, the proposed integrated air-surface-undersea network is wireless, distributed, and built from mobile platforms, offering broader connectivity. As mobile wireless communications transformed life compared with fixed telephony, a wireless mobile sea-based network will create new opportunities. This does not imply that fixed underwater networks should be entirely replaced; they still offer advantages in nearshore and shallow-water applications and may complement wireless networks.
Developing a global integrated network analogous to terrestrial and space networks is challenging. A pragmatic approach is to encourage multiple technological avenues and begin with local demonstration systems. A suitable testbed in deep water should aim for medium- to long-range communication; core elements include seafloor autonomous observatories or data aggregators, deep reliable acoustic channels, AUVs and USVs, and radio-acoustic buoys, forming a minimal cross-interface network. Figure 2 illustrates a conceptual local integrated marine wireless mobile network. If 5G/6G technologies meet underwater requirements in the future, they may join the integrated network. A local testbed would provide crucial first impressions to guide large-scale development. To date, no such demonstrative local integrated marine communication network has been reported; existing systems like cable-connected acoustic monitoring (e.g., SOSUS) and later optical-cable multi-node systems are fixed, costly, inflexible, and reliant on land facilities. For global coverage, emphasis should be on wireless, mobile, scalable, and low-cost solutions. Many technical challenges remain, so initial testbeds should be started without delay.
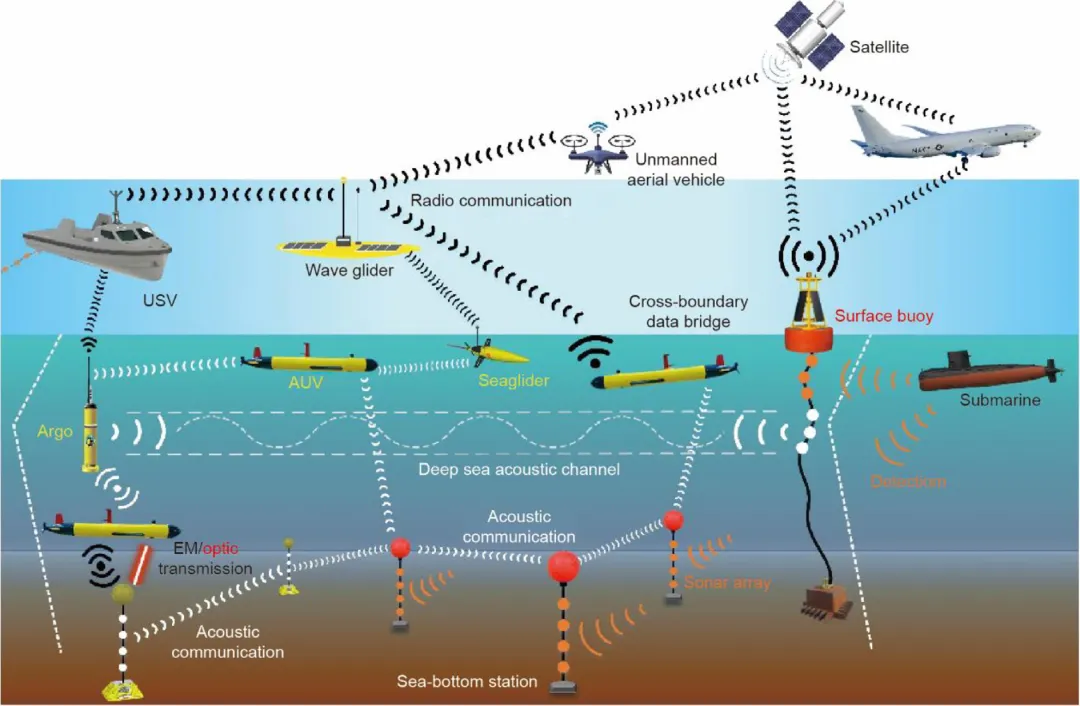
Figure 2. Concept for an integrated air-surface-undersea sea-based network.
6. Conclusion
Although 4G and 5G technologies have progressed substantially and 6G attracts attention, wireless mobile communication and networking technologies for the underwater domain lag far behind. This is due to physical constraints on electromagnetic propagation in seawater and the prospects of acoustic technology. Based on this analysis, the paper provides solutions and a vision for future 6G research in the underwater domain. It reviews operational needs, bottlenecks, physical discoveries, technological breakthroughs, and interdisciplinary integration, and summarizes the state and potential of marine wireless communication. Key aspects discussed include exploiting channel properties, developing diverse mobile platforms, and organizing communication networks, with detailed scenario analysis. To combine radio and acoustic advantages, the paper proposes constructing cross-medium "data bridges" and feasible methods to build an integrated air-surface-undersea sea-based network. Although the vision is promising, due to marine network sparsity and heterogeneity, development should begin with local demonstration systems across diverse application scenarios and scales. Underwater 6G may differ significantly from terrestrial or aerial 6G; universal 6G in the marine domain remains viable but will assume a distinct form.
Large-scale underwater networks share characteristics with deep-earth and deep-space networks, such as physical constraints at the physical layer, high latency, multi-medium traversal, heterogeneous network structures, and specialized protocols. Deep-earth, deep-space, and deep-sea exploration involve common communication challenges and should evolve collaboratively. This synergy can further expand 6G research areas and applications.
Note: This article has been edited for presentation. See the original paper for full details.
Original paper: Yuanliang Ma, Qunfei Zhang, Honglei Wang. "6G: Ubiquitous Extending to the Vast Underwater World of Oceans." Engineering, 2022, 8(1):12-17.