The mobile robot industry is growing rapidly. By 2023, World Robotics estimated the market value near $30 billion. In the near future, manufactured robots will address a wide range of market problems by solving both well-known and emerging challenges. Their tasks go beyond moving from point A to point B: they make real-time decisions based on environmental inputs and mission parameters.
Power networks require high power density and scalability
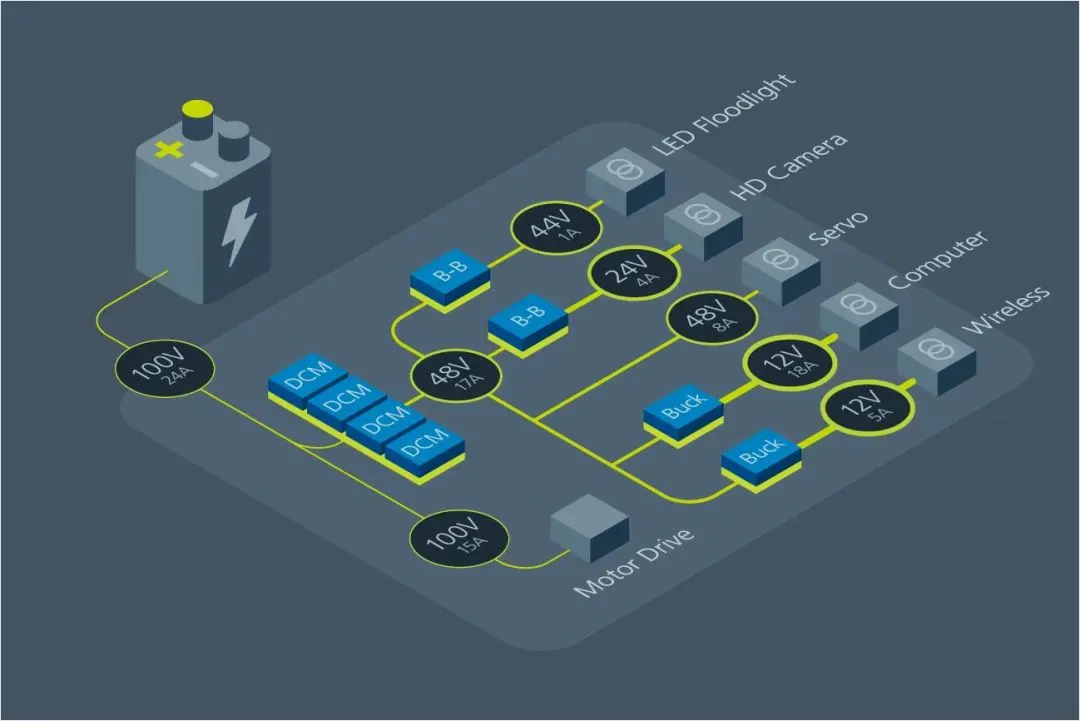
Figure 1: DC converter series with input voltages from 43 to 154 V can meet these demands. The DCM3623 can regulate 24 V or 48 V from a battery to supply servo drivers, other payloads, and downstream converters. The DCM3623 is available in a 36 x 23 x 7.3 mm package and can deliver 240 W at about 90% efficiency. ZVS buck or buck-boost regulators are commonly used to build 24-to-48 V rails that feed lower-voltage lines.
Delivering these capabilities requires motors, sensors, and processing subsystems. To stay competitive, a robot platform must be able to upgrade these components quickly when better options become available. Achieving that while meeting size, weight, and cost targets requires an optimized, scalable power distribution network (PDN) that accommodates evolving needs. The following questions will help you design a PDN suited to your platform and resilient to changes driven by task parameters.
01. Is your battery optimized for lightweight, low-loss distribution?
Battery economics (cost, energy density, lifecycle) and longevity (cycle count, aging) matter, but have you considered how the selected voltage affects overall system weight? According to Ohm's law, distributing at higher voltage and lower current allows thinner, lighter cabling. Thinner cables have lower cross-section compared to heavier cables, reducing the system thermal losses and waste heat. For these reasons, many systems use 48 V (or higher) architectures instead of 12 V, and efficient lightweight converters are available, including fixed-ratio BCM and regulated DCM modules.
02. Is the PDN optimized for charge intervals and future payloads?
Platforms evolve: processors become faster, motors and actuators increase in number, and sensor arrays require more power. Do you want to redesign the PDN each time a subsystem is upgraded? Instead of redesigning, you can increase overall battery capacity by adding parallel battery packs at the same PDN voltage. That avoids reworking system voltages and dealing with ripple effects across the platform. To future-proof the PDN, choose a battery distribution voltage of at least 48 V and use discharge characteristics that support fixed-ratio converters when powering subsystems. Fixed-ratio converters are more efficient, smaller, and lighter for buck conversion. A PDN can place small modular converters where you need to step 48 V down to 12 V or to SELV voltages from higher voltages.
03. Do dynamic loads add unnecessary weight to the system?
A brute-force way to supply dynamic loads is to oversize PDN cabling to handle peak power, but if loads have low duty cycles, a large cable significantly increases weight. An alternative to large cabling is local energy storage near the load, for example a capacitor placed close to the load to supply peak demand. Another optimized option is a fixed-ratio converter. These converters act like an ideal transformer and also provide the benefit of reflected capacitance from output to input. That means a capacitor on the input can look like the output capacitor scaled by the converter's K factor. A lighter solution uses a small input capacitor on the fixed-ratio converter instead of deploying a much larger capacitor downstream.
04. Should you plan for autonomous operation?
Automation is critical to efficiency. Even if a robot is currently manually controlled, many manually performed tasks will likely be automated in the future. Current machine learning and artificial intelligence hardware can be power-hungry, but modular power solutions can meet these requirements. Planning additional power capacity now will simplify scaling when AI is integrated into enhanced capabilities.
05. Battery or tethered power?
Do not underestimate the advantages of tethered designs, especially in constrained workspaces such as factories, warehouses, or arenas. Robots, including teleoperated and autonomous platforms, are already using tethered power systems that deliver kilowatts over a cable with a small diameter. For a given cable size and weight, higher voltage delivers more power.
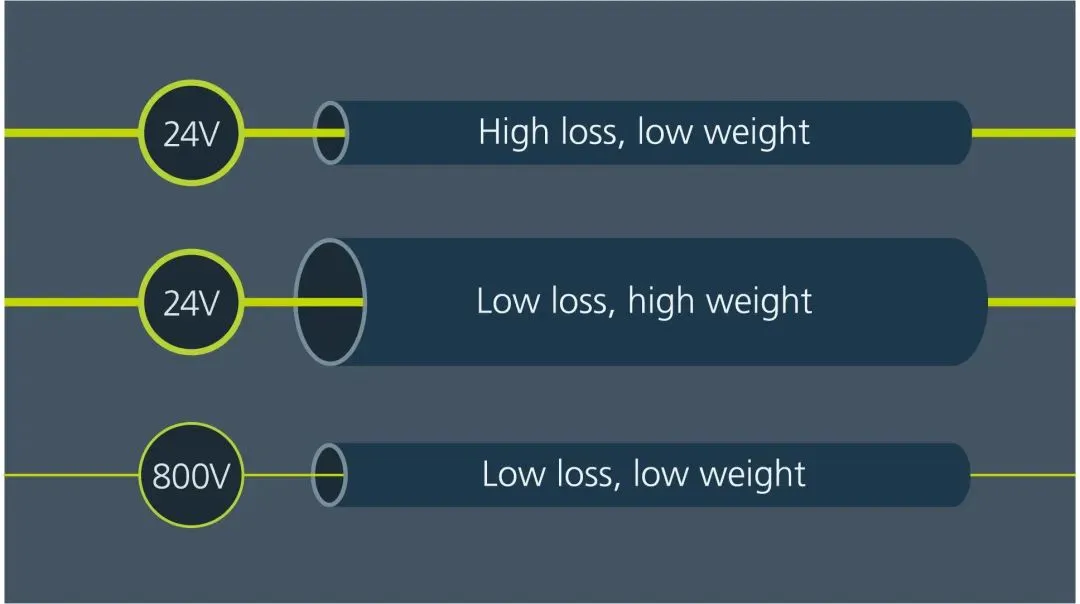
Figure 2: Tethered power supports extended operation time. You can raise the voltage to 400 V, 800 V, or higher to supply more power for broader platform functions such as sensors and data collection. While this keeps the tether lightweight, remember that lightweight converters can still provide additional advantages, as discussed in sections 1 and 3.
Some mobile robots connect to a base station via a tether. In applications such as underwater inspection, a tether expands the operational range and enables high-bandwidth data transfer from cameras in noisy or harsh environments. Thinner, lighter cables allow deeper and farther operation, but thin cables limit traditional PDN power transfer. A modular approach that supports higher-voltage transmission over the tether can reduce cable size and weight without sacrificing power. Small, lightweight power modules also reduce robot mass and increase payload capacity.
06. Does your modularity add value?
Standardized interfaces for mechanics, data, and power enable modularity. Module-level FRUs improve field serviceability, but interfaces can become outdated relative to system requirements. For decades, 12 V was the standard PDN voltage for computing and automotive systems; with rising power levels, 48 V is gaining adoption. To preserve the value of modularity, use converters that provide efficient voltage transitions while maintaining the existing service interfaces. For example, a bidirectional, high-efficiency bridge can interconnect 12 V and 48 V rails, enabling backward compatibility while supporting higher-voltage distribution.
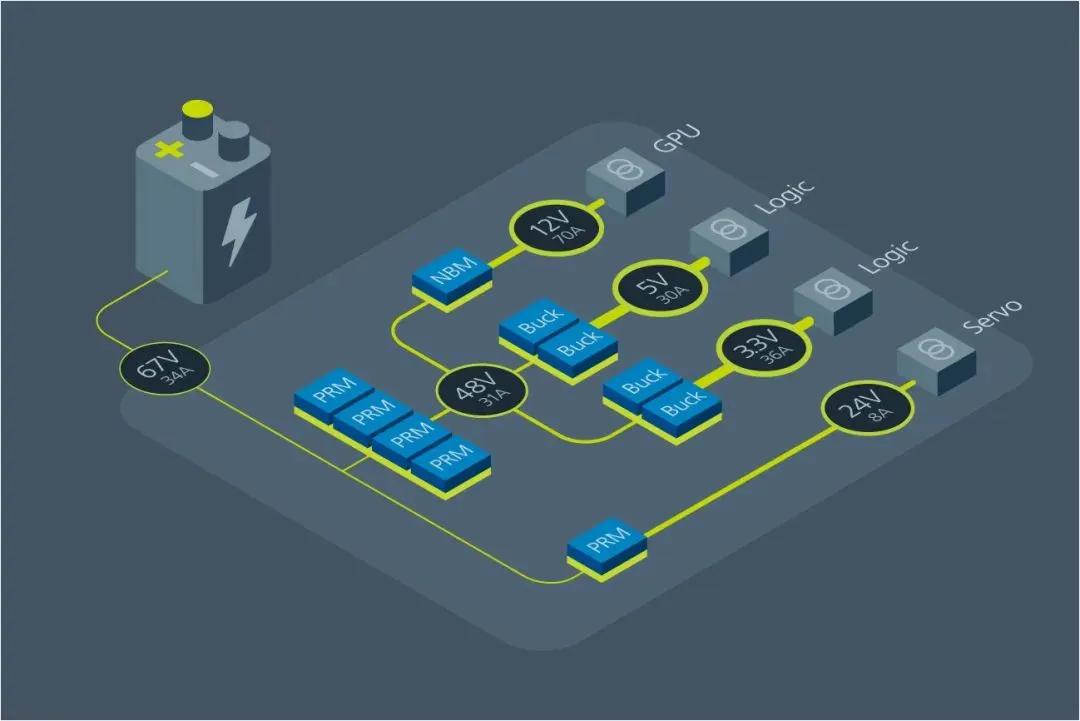
Figure 3: The first power-chain example highlights high-performance buck-boost power modules. These modules can create a 24 V to 48 V intermediate bus at 96% to 98% efficiency to feed servo systems and downstream power modules, including fixed-ratio, ZVS buck, and ZVS buck-boost converters. All modules can be paralleled for higher-power conversion.
Better power delivery
These six questions guide PDN design:
- Deliver distribution with smaller thermal and mass impact.
- Distribute heat to improve thermal management.
- Allow increased battery capacity without PDN voltage redesign.
- Provide PDN scalability for power, capacity, and autonomy.
- Use standardized interfaces to enable modular expansion in the future.







