Summary
Researchers led by Professor Chen Huawei at Beihang University reported a design and fabrication method for magnetically controlled robots that integrates in-situ motion programming and pose sensing. Using 4D spray printing, the team fabricated a carbon-magnetic thin-film multilayer material that couples electrothermal magnetization with resistive strain sensing, enabling multimodal actuation and integrated pose sensing (Figure 1). The work was published in Research as "A Magnetic-Driven Multi-Motion Robot with Position/Orientation Sensing Capability".
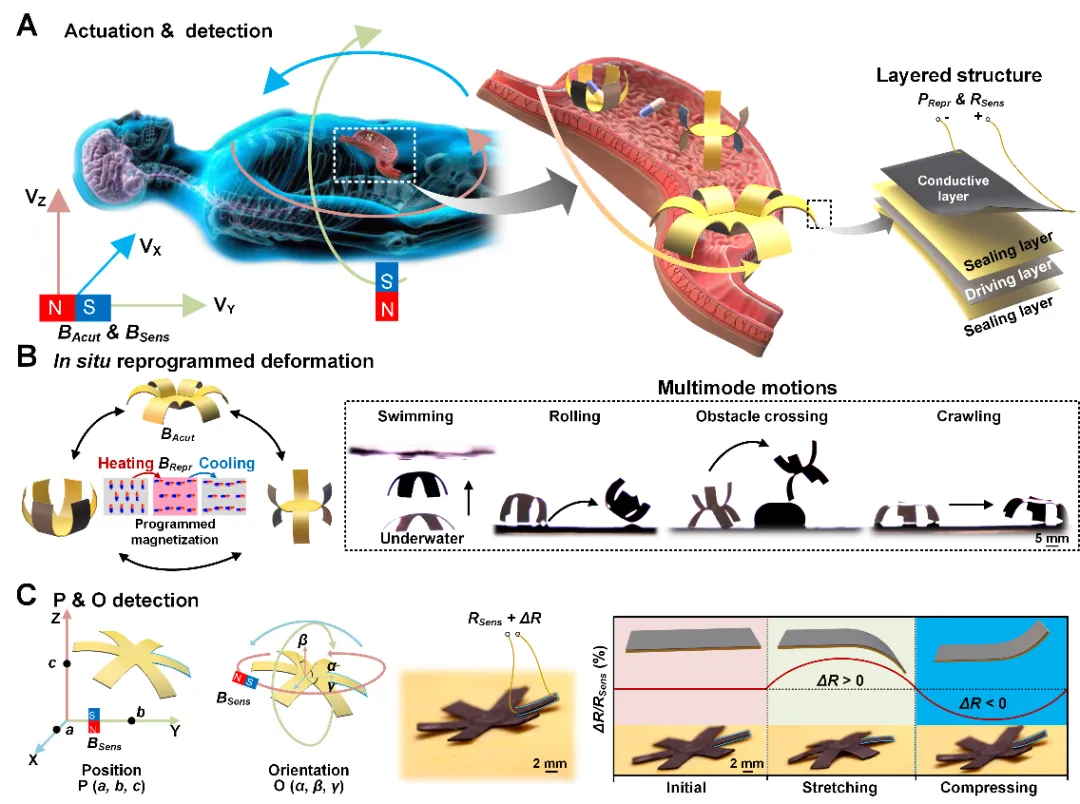
Figure 1: Integrated multimodal actuation and pose sensing
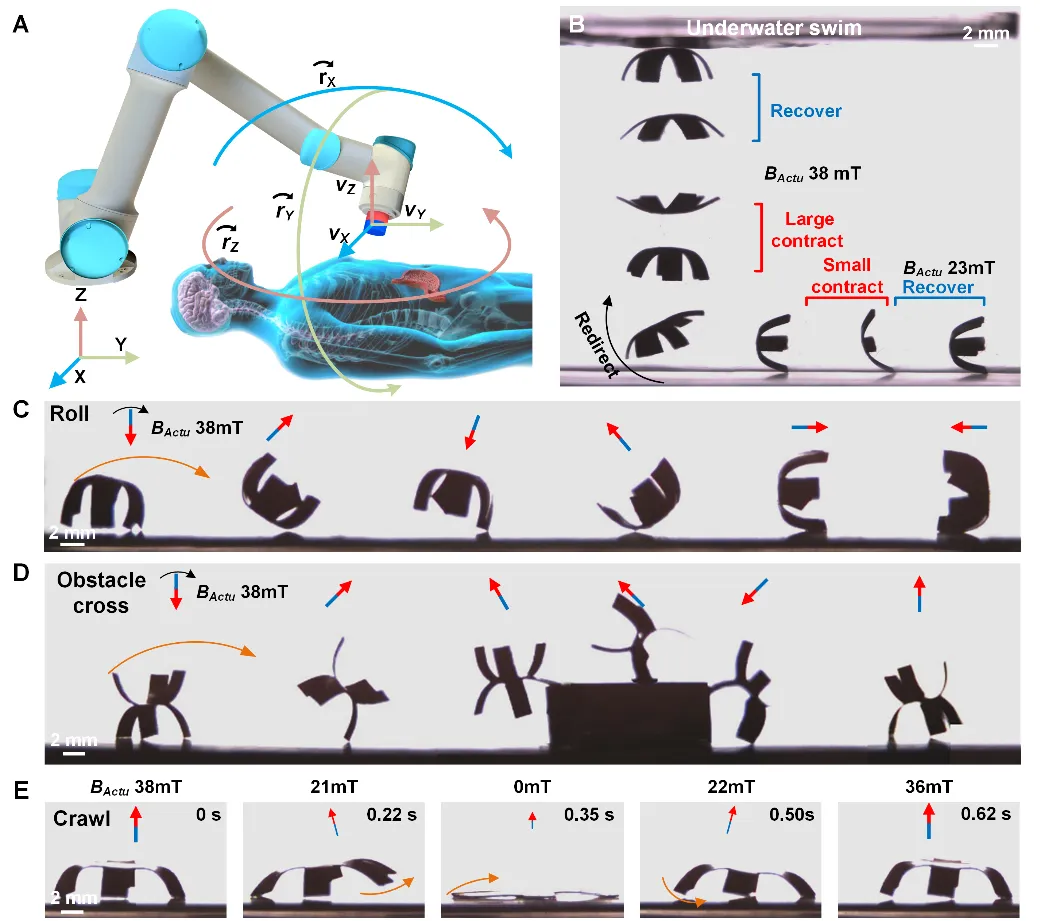
Through in-situ reprogramming, the robot's multimode motion improves adaptability to complex movement and manipulation tasks. Combined with onboard pose sensing, the system can achieve accurate reprogramming and operations even in non-visual gastrointestinal environments, which supports complex drug delivery and release as well as tissue inspection. This approach suggests a path toward developing precise, multifunctional magnetically driven gastrointestinal medical robots (Figure 2).