Overview
Sensing physiological properties of biological tissues is important for understanding tissue development and supporting disease diagnosis and treatment. Accurately sensing properties of deep soft tissues can help monitor disease progression and provide feedback for therapy. For example, malignant tissue can become stiffer than healthy tissue, and some intestinal diseases involve local changes in pH.
Approach
Researchers have proposed a minimally invasive method that uses wireless miniature soft robots to detect physiological properties of biological tissues, extending the diagnostic capabilities of these robots.
Background
Traditional medical imaging methods mainly assess tissue elasticity and cannot measure higher-order physiological properties such as adhesion. Implanted electronic sensors can continuously monitor advanced tissue properties like adhesion, pH, viscoelasticity, and biomarkers used for diagnosis. However, implants are invasive, require surgery, and often provoke inflammation.
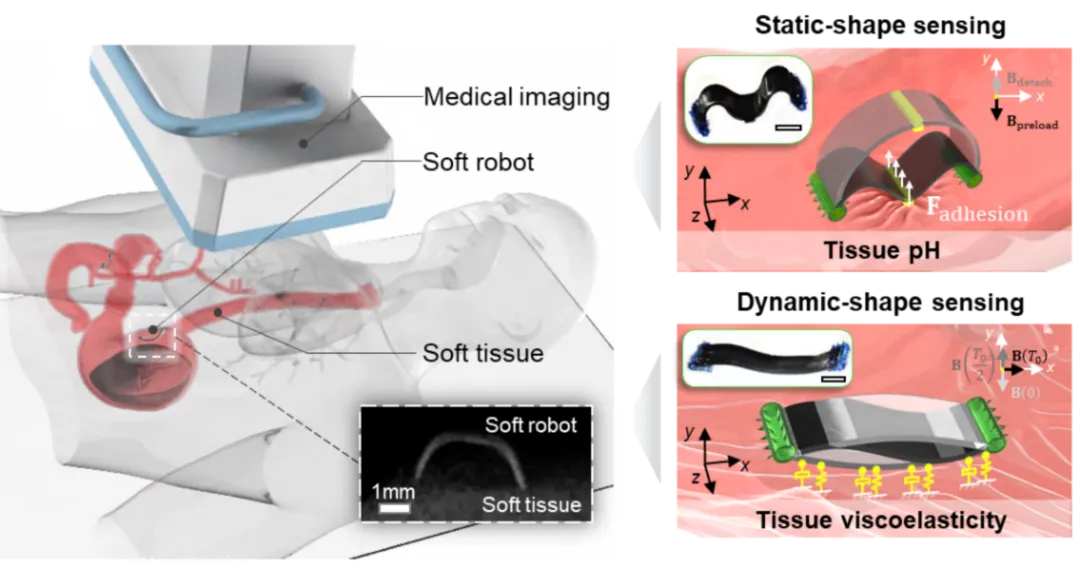
Figure: System for detecting soft tissue physiological properties using wireless miniature soft robots (Source: Science Advances)
Principle
This work combines wireless soft robots with medical imaging to sense advanced tissue properties such as deep-organ adhesion, pH, and viscoelasticity. Millimeter-scale soft robots driven remotely by magnetic fields can controllably attach to and detach from tissue surfaces and mechanically interact with tissues. The robots can be monitored and tracked with medical imaging modalities such as ultrasound and X-ray.
By combining external magnetic field information and the robot's tracked shape with a mechanical model, tissue physiological properties can be quantified precisely. Compared with previously reported implanted electronic sensors, magnetic microdevices, and capsule endoscopes, this method leverages the robots' multimodal locomotion to traverse tissue barriers and access confined spaces with minimal invasiveness. It also enables sensing of higher-order tissue properties, such as adhesion, pH, and viscoelasticity, which are difficult to measure with standard medical imaging, standalone electronic sensors, or other existing clinical devices.
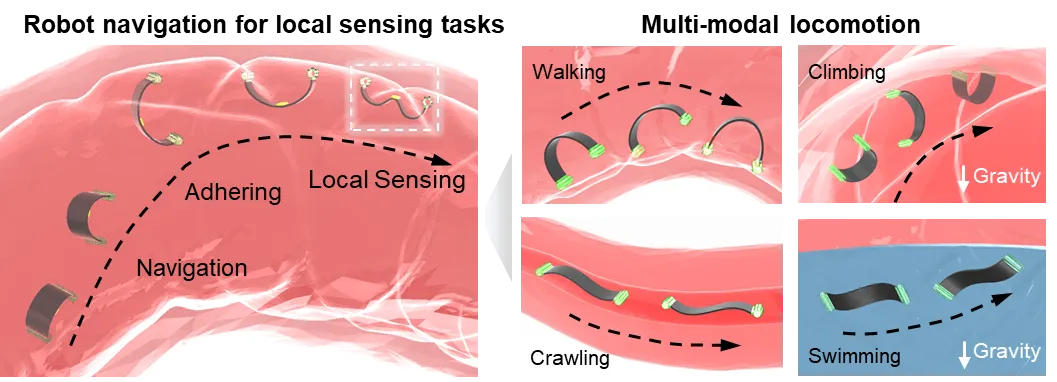
Figure: Multimodal locomotion of the soft robot (Source: Science Advances)
Applications and Demonstration
Potential applications include targeted minimally invasive diagnostics and localized disease monitoring. In X-ray imaging experiments, the robots were deployed to diseased regions in mouse models and driven by external magnetic fields to measure local tissue pH and viscoelasticity.
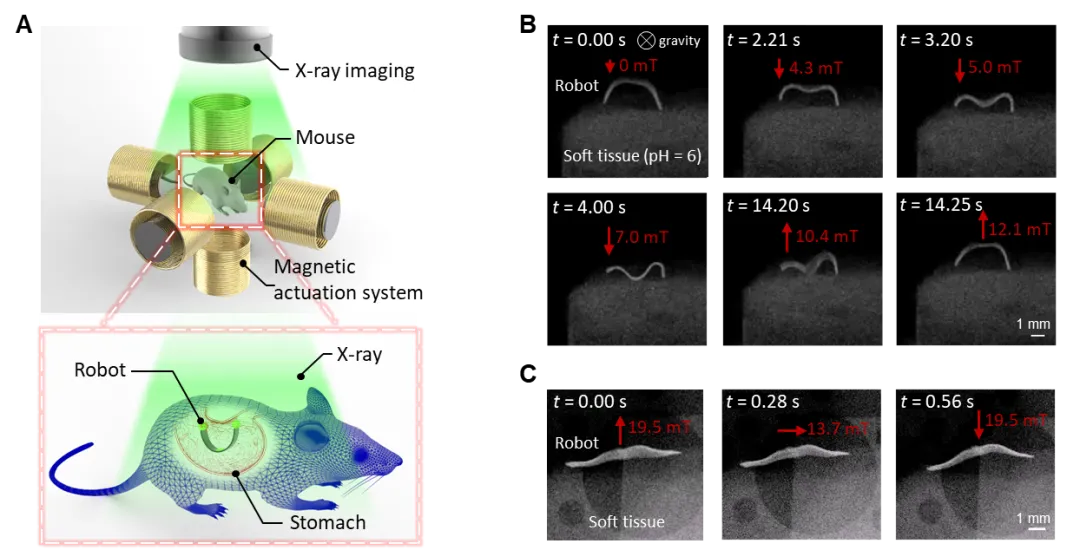
Figure: Detection of tissue properties in diseased regions of a mouse model (Source: Science Advances)
Publication
The research was reported in the paper "In situ sensing physiological properties of biological tissues using wireless miniature soft robots," published in Science Advances. The work involves contributors from the Max Planck Institute for Intelligent Systems and ETH Zurich. Lead contributors include doctoral student Chunxiang Wang (Max Planck Institute for Intelligent Systems), postdoctoral researcher Yingdan Wu (Max Planck Institute for Intelligent Systems), and Professor Xiaoguang Dong (Vanderbilt University). Professors Xiaoguang Dong and Metin Sitti (Max Planck Institute for Intelligent Systems) are corresponding authors.







