Many companies have developed high-performance robots. For example, Google's BigDog, robots capable of backflips, and Boston Dynamics' Spot.
These robots move with high agility and have attracted attention online. Robot control techniques are complex, but the underlying mechanical principles are relatively simple: most locomotion mechanisms are various types of linkages. A linkage is a structure formed by fixed-length segments joined at their endpoints.
1. Parallel Four-Bar Mechanism
The parallel four-bar mechanism is a simple, low-cost, and reliable hinged four-bar arrangement. Its elements form a parallelogram and it can provide stable horizontal motion.
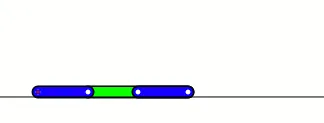
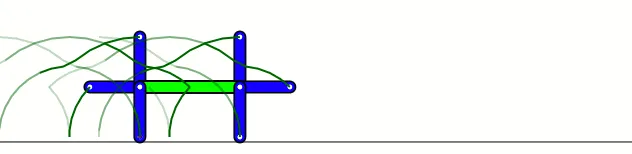
This configuration can almost function like wheels in some designs.
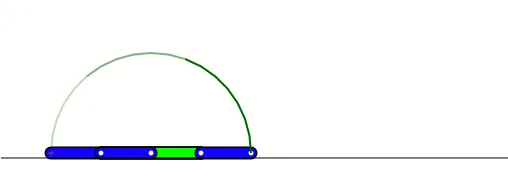
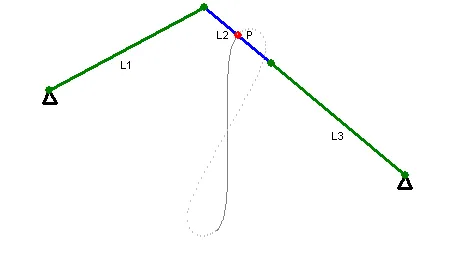
2. Chebyshev Linkage
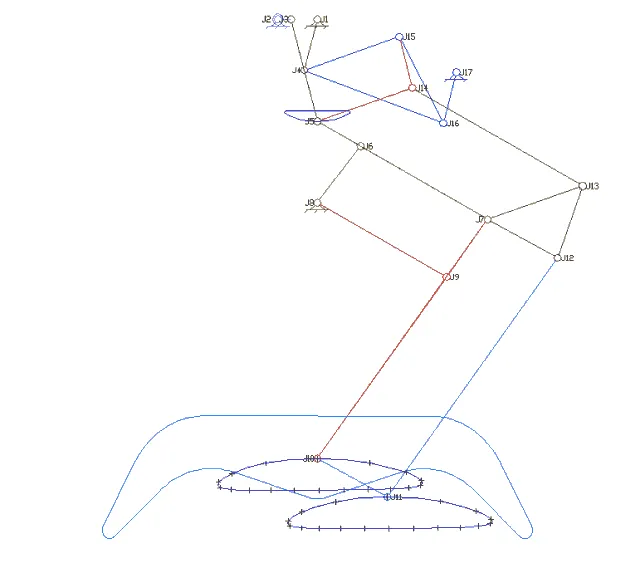
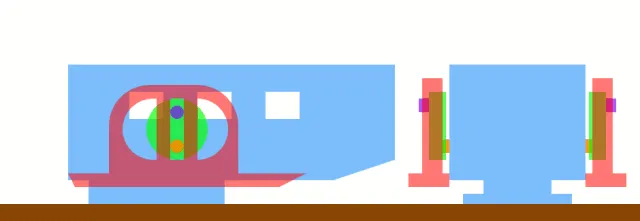
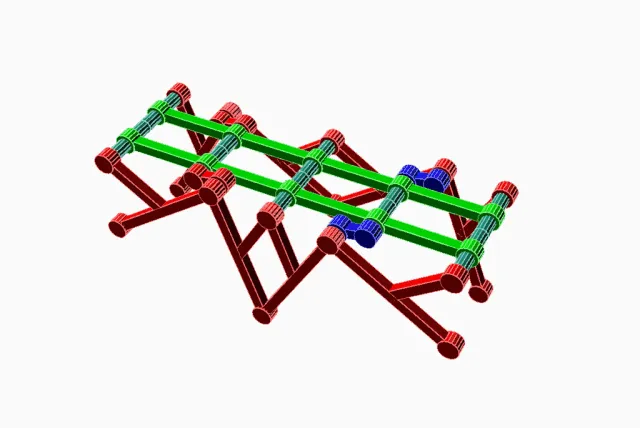
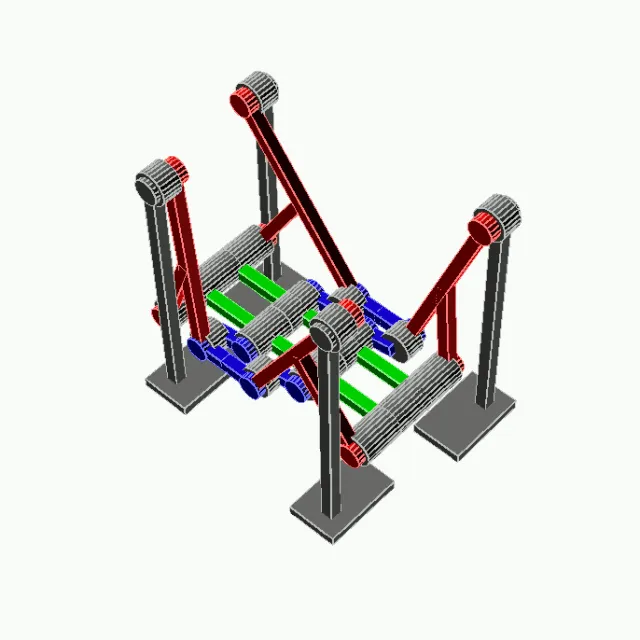
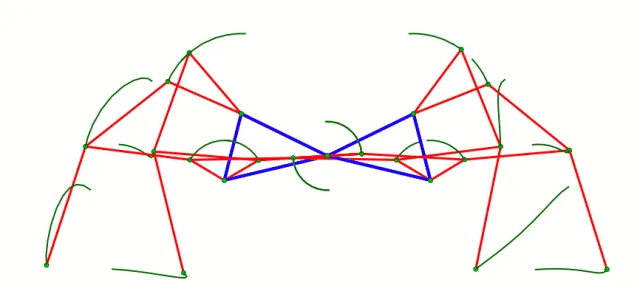
The mechanism shown below is a four-bar linkage composed of a fixed link, driving link, driven link, coupler, and an extended coupler. This Chebyshev linkage produces the periodic leg motions required for lifting, stepping, pushing against the ground, and forward progression. Other unlabelled members form parallelogram arrangements with parts of the Chebyshev linkage to keep the foot surface parallel to the ground. It is often used to generate smooth walking trajectories with high efficiency.
Chebyshev linkages are frequently used to simulate walking.

The gait produced is relatively smooth and resembles small, quick steps.
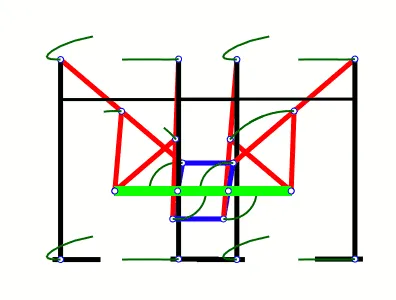
Some variants of these mechanisms can produce inverted motions that still maintain the intended gait characteristics.
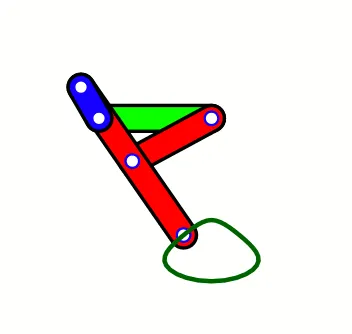
3. Klann Linkage
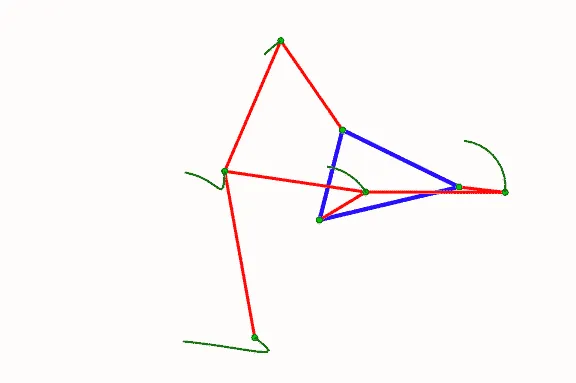
A single Klann linkage functions as shown above. It converts a rotating input into a quasi-walking motion using several coupled bars.

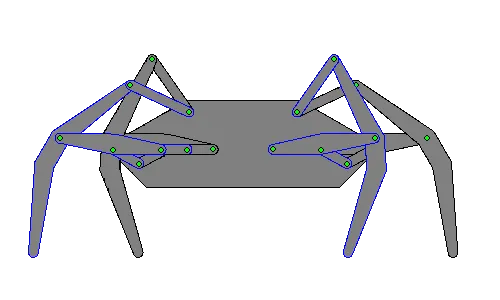
Klann linkages are often used in four-legged configurations and produce characteristic walking motions.
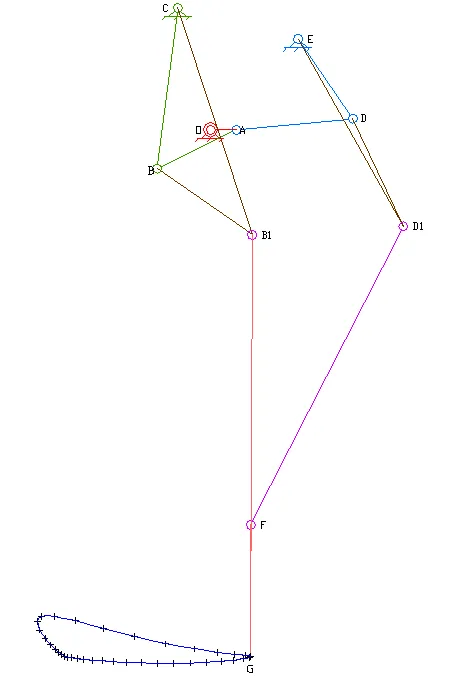
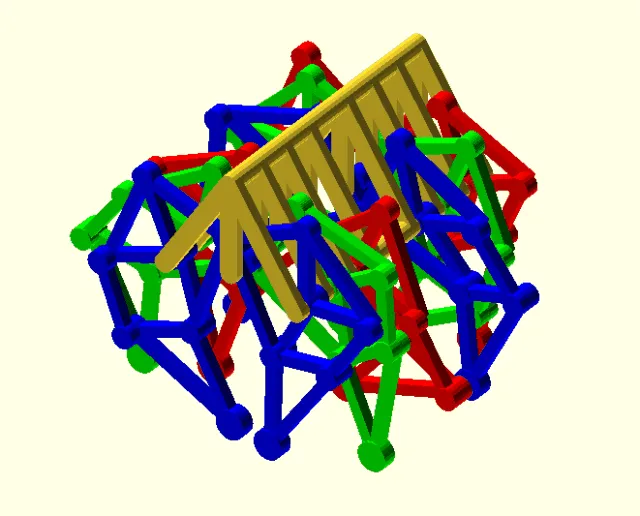
4. Jansen Linkage
The Jansen linkage, invented by Theo Jansen, is designed to simulate smooth walking. Jansen used this linkage to build large walking sculptures. The mechanism combines aesthetic form with practical function: a simple rotary input can reproduce biological walking motions. Variants have been used in walking robots and gait analysis, and the linkage can be scaled up to create large walking mechanisms such as electric spiders.
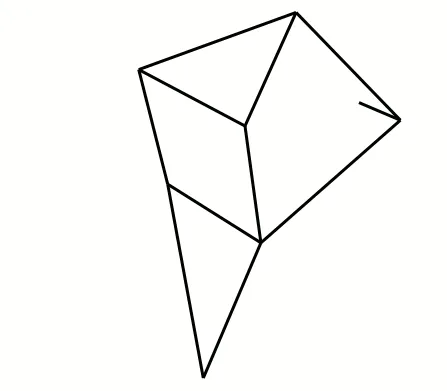
A single Jansen leg operates as shown above.
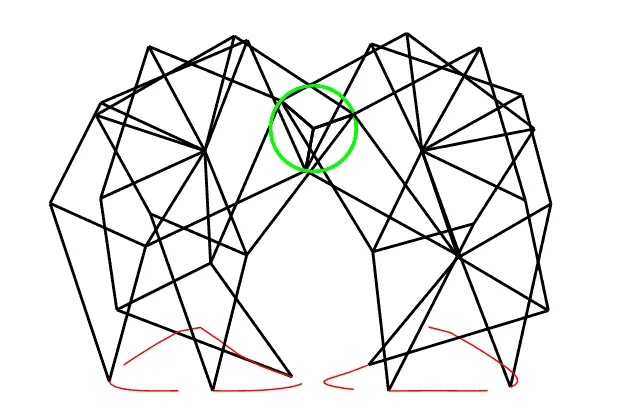
Large multi-legged assemblies can create striking visual and mechanical effects.
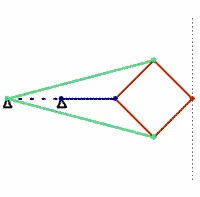
5. Peaucellier Linkage
The Peaucellier linkage was the first planar linkage to convert rotary motion into a true straight-line motion. Its straight-line trajectory can be demonstrated with basic geometry.
6. Watt Linkage
The Watt linkage is used to generate approximate straight-line motion and is commonly seen in vehicle undercarriages. Invented by James Watt, the linkage constrains the midpoint of a moving link so that it follows an approximate straight path. It was originally applied to steam engines and later used in vehicle suspension systems.
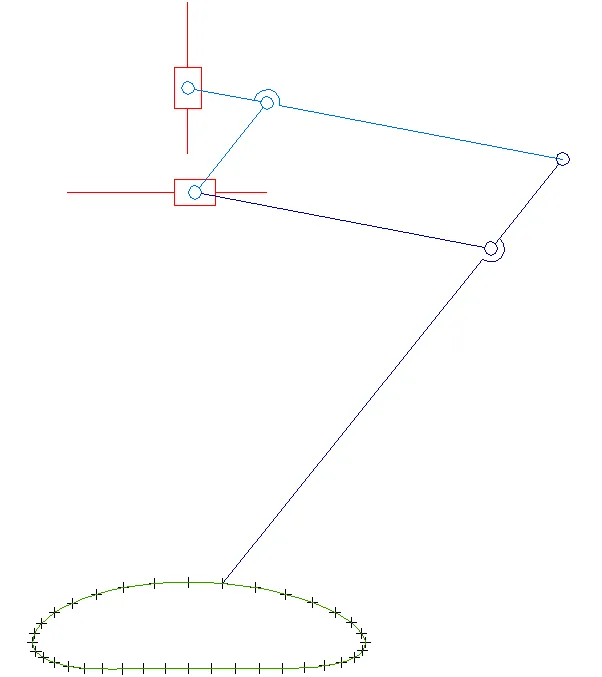
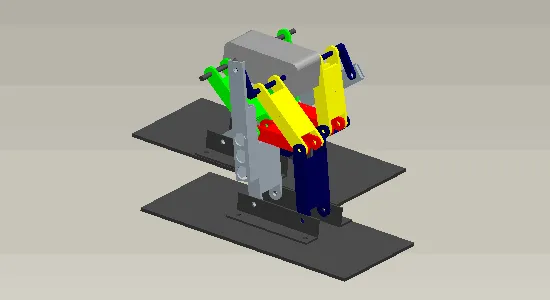
7. Other Mechanisms for Simulating Walking
There are many other mechanisms that mimic walking. Some are complex and combine different input types. For example, some designs use linear actuator input instead of rotary input to control leg extension directly.