How to plan robot motion is a major topic in robotics development. This article summarizes an open-source GitHub library that implements commonly used path planning algorithms for robots, with animated GIFs demonstrating the processes. Most of the code is implemented in Python.
The open-source library implements both search-based and sampling-based path planning algorithms. The directory structure is shown below:
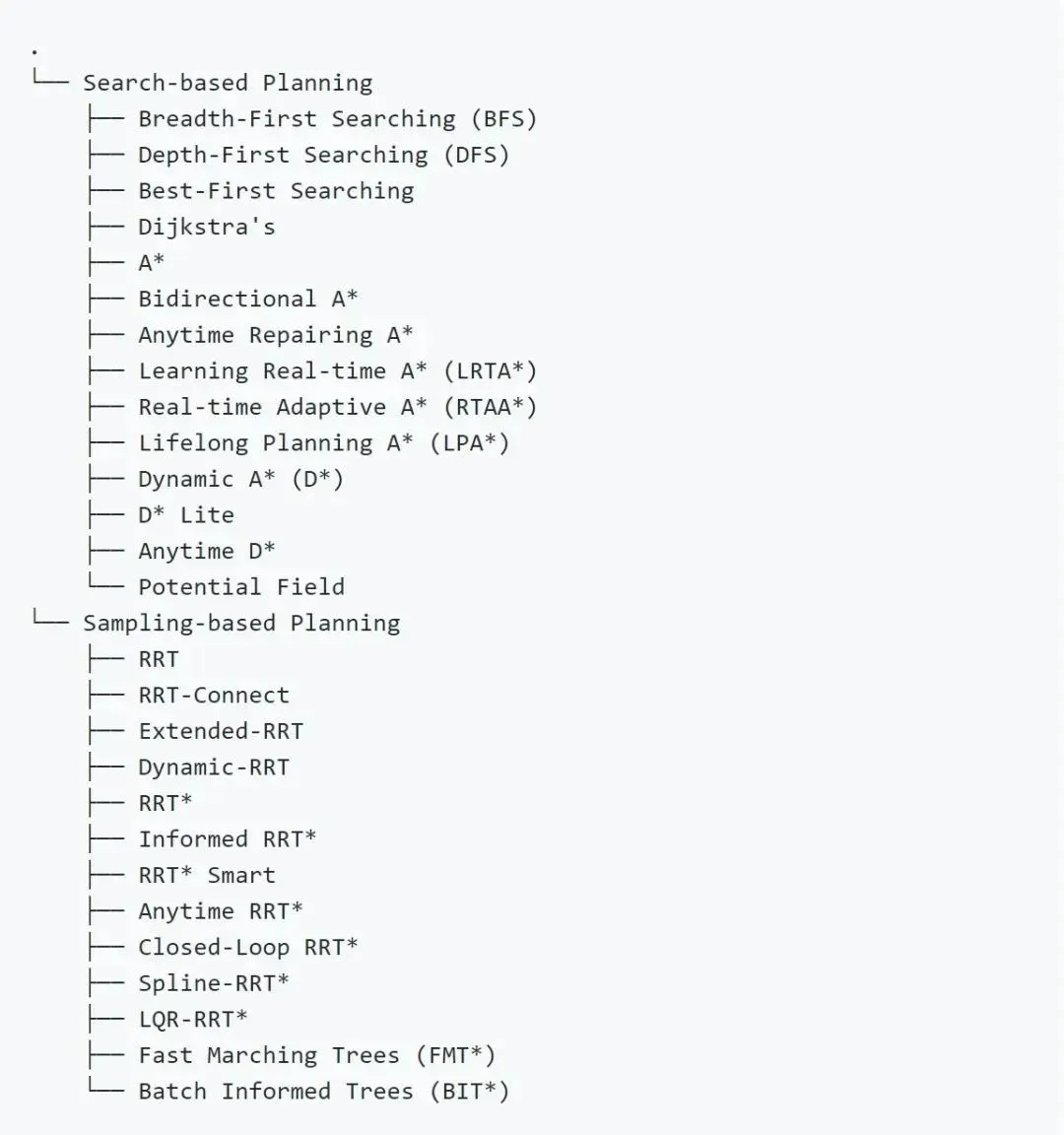
Search-based path planning algorithms
Search-based path planning algorithms are mature and widely used, often for character navigation in games and for mobile robot path planning.
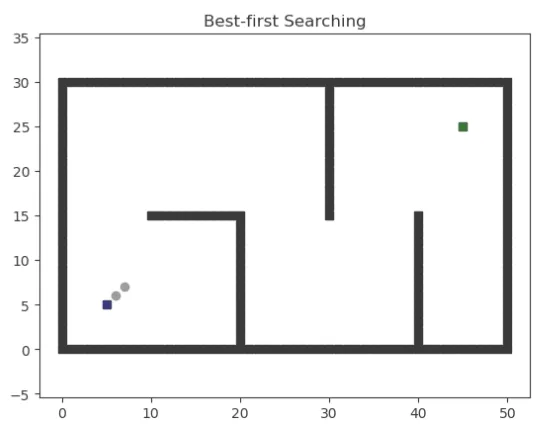
Best-first search algorithm
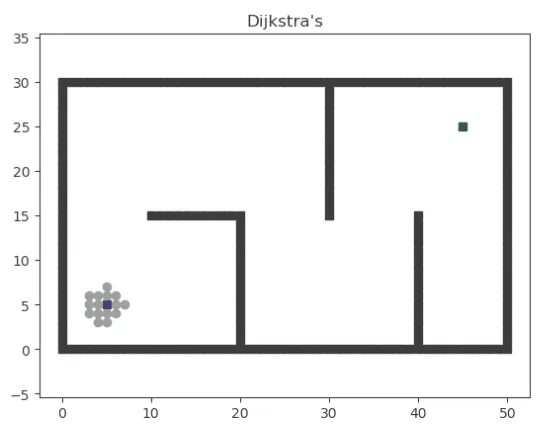
Dijkstra algorithm
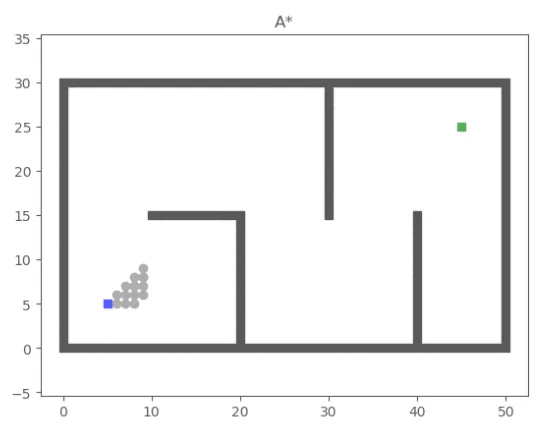
A* search algorithm
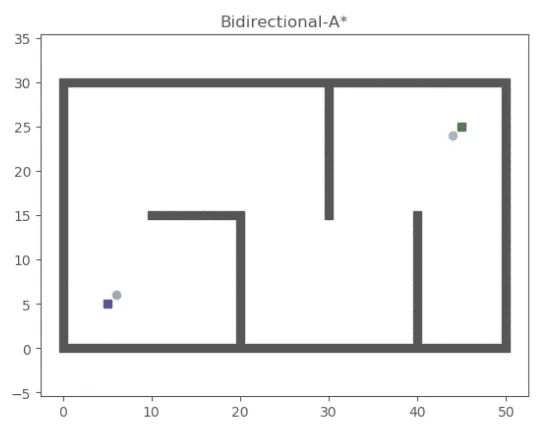
Bidirectional A* search algorithm
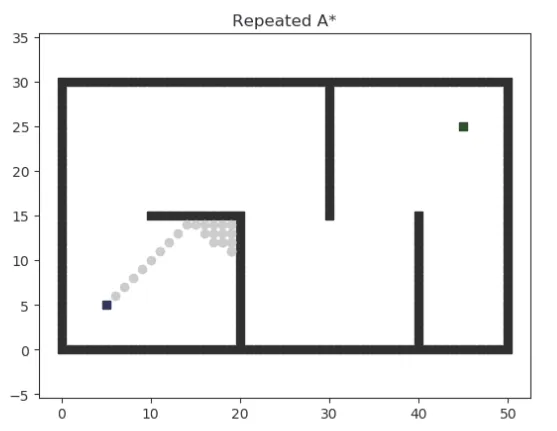
Repeated A* search algorithm
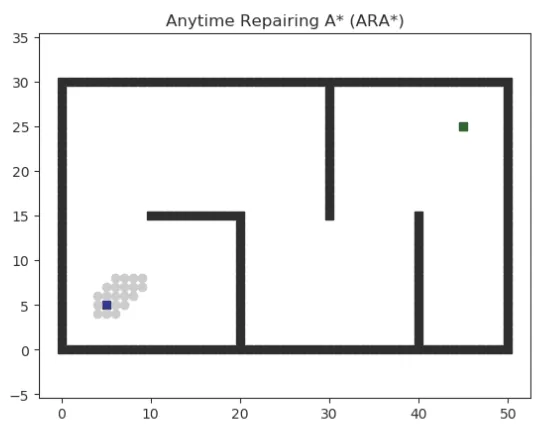
Anytime Repairing A* (ARA*) algorithm
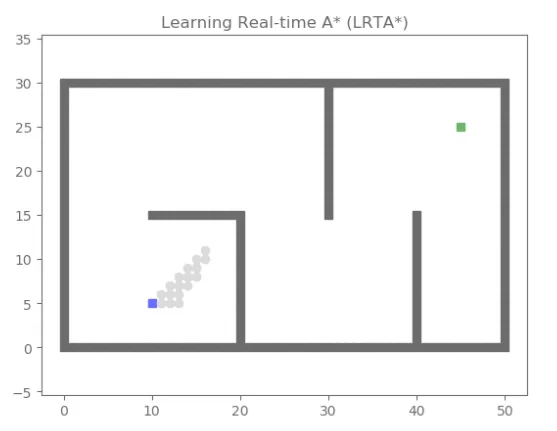
Learning Real-Time A* (LRTA*) algorithm
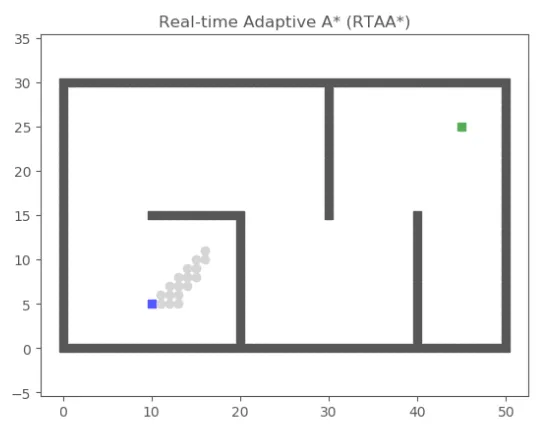
Real-Time Adaptive A* (RTAA*) algorithm
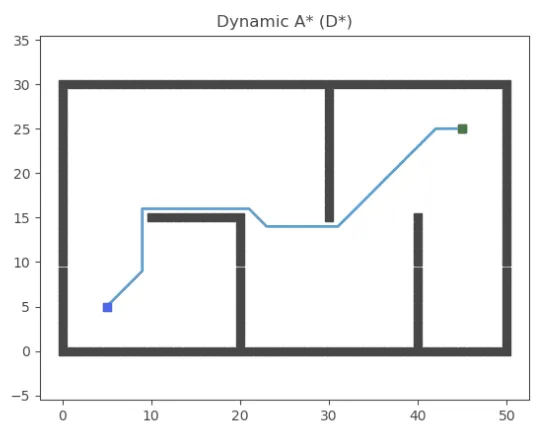
Dynamic A* (D*) algorithm
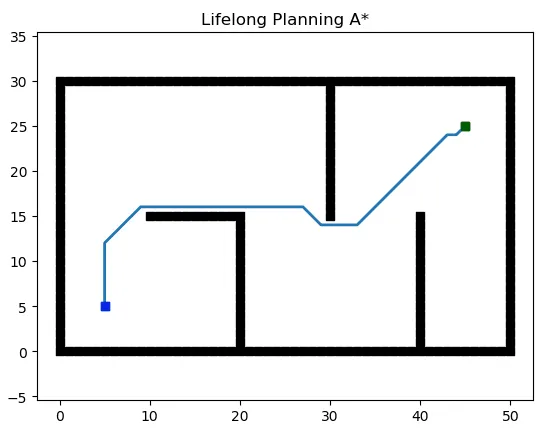
Lifelong Planning A* algorithm
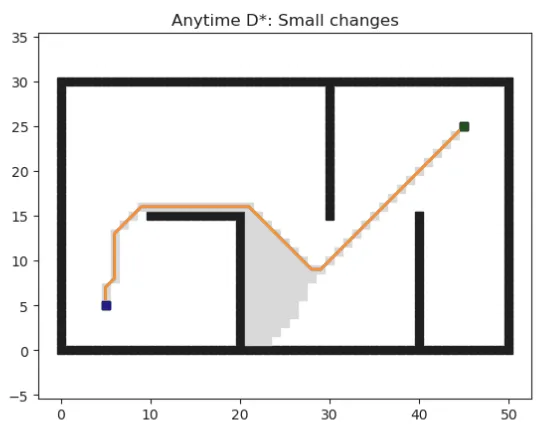
Anytime D* search algorithm: small changes
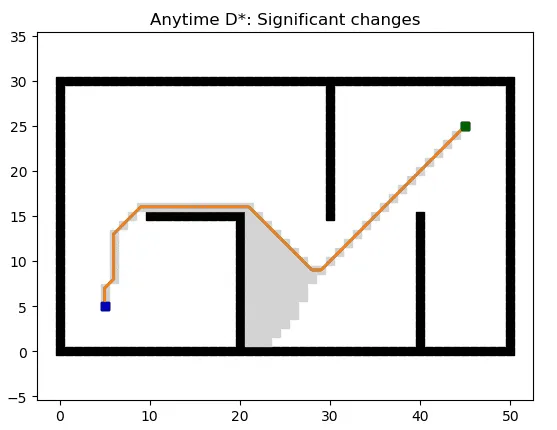
Anytime D* search algorithm: large changes
Sampling-based path planning algorithms
Unlike search-based methods, sampling-based path planning algorithms do not require explicit construction of the entire configuration space and are widely used for planning in high-dimensional problems.
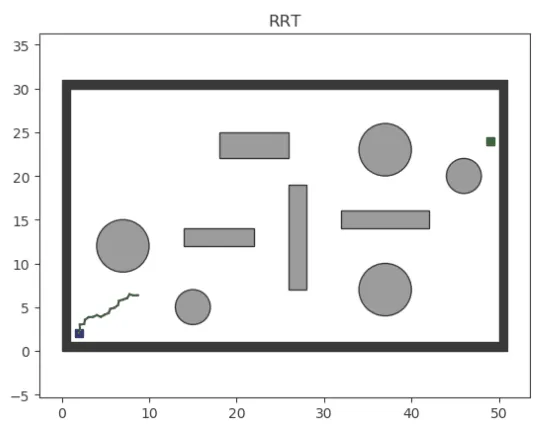
Rapidly-exploring Random Tree (RRT) algorithm
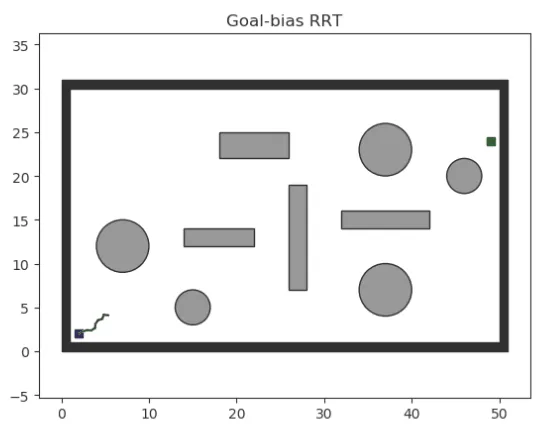
Goal-biased RRT algorithm
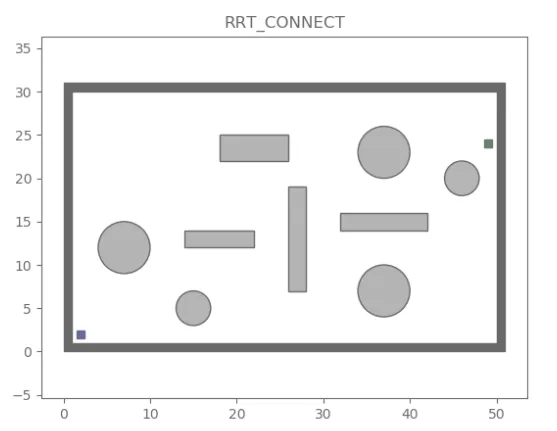
Bidirectional RRT (RRT-Connect) algorithm
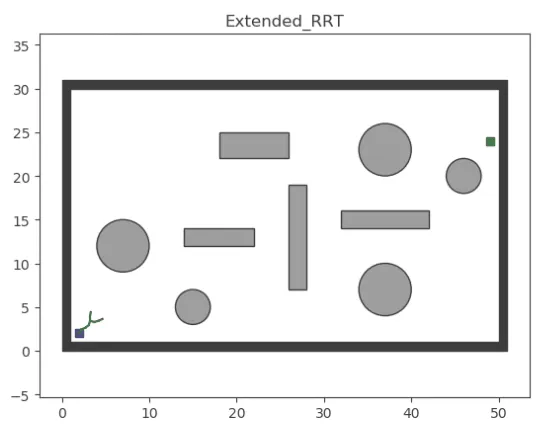
Extended RRT algorithm
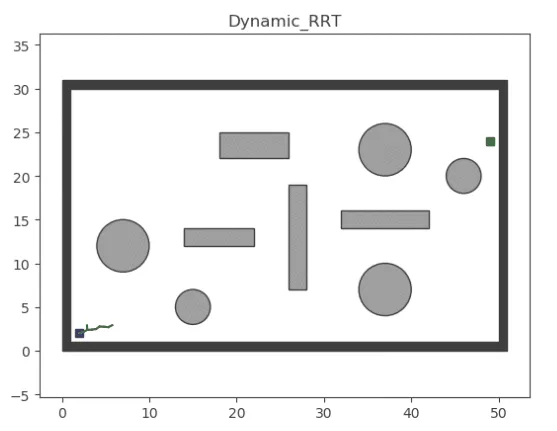
Dynamic RRT algorithm
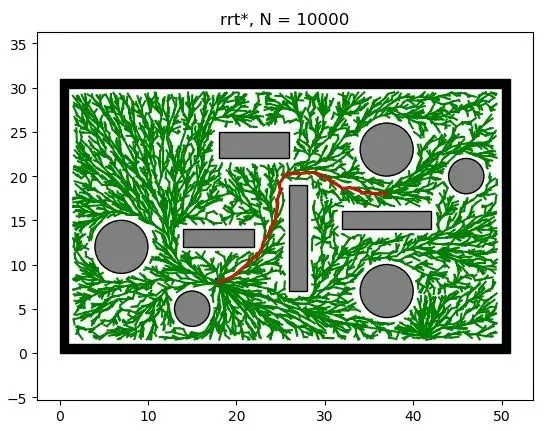
RRT* algorithm with N = 10000
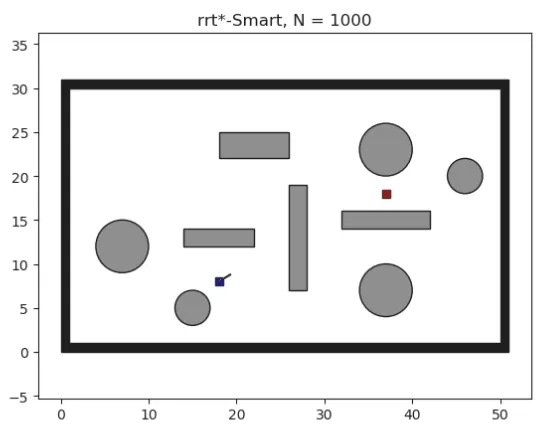
RRT*-Smart algorithm with N = 1000
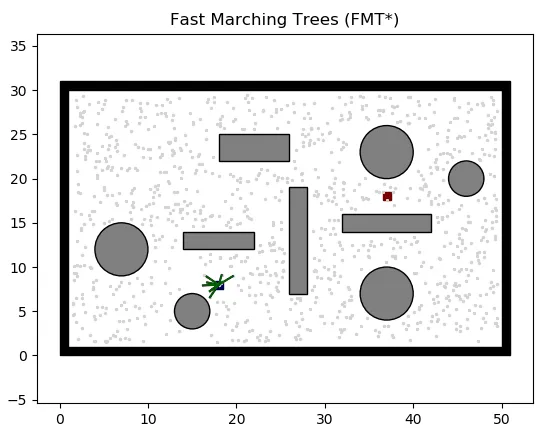
Fast Marching Tree (FMT*) algorithm
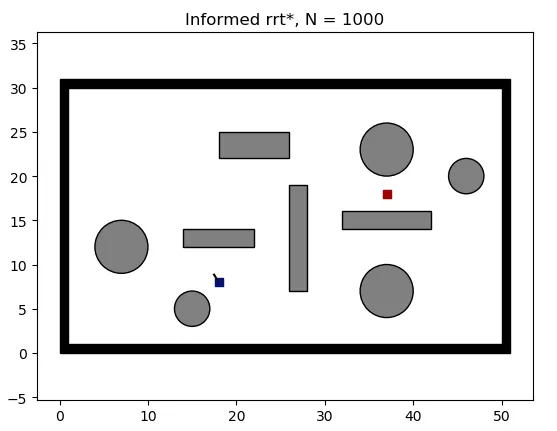
Informed RRT* algorithm with N = 1000
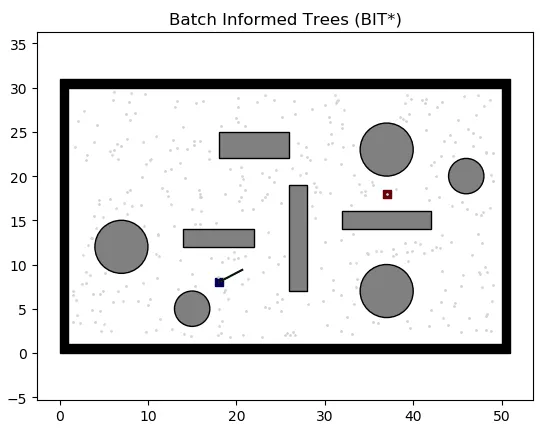
Batch Informed Tree (BIT*) algorithm