Multi-Level Map Construction for Dynamic Scenes
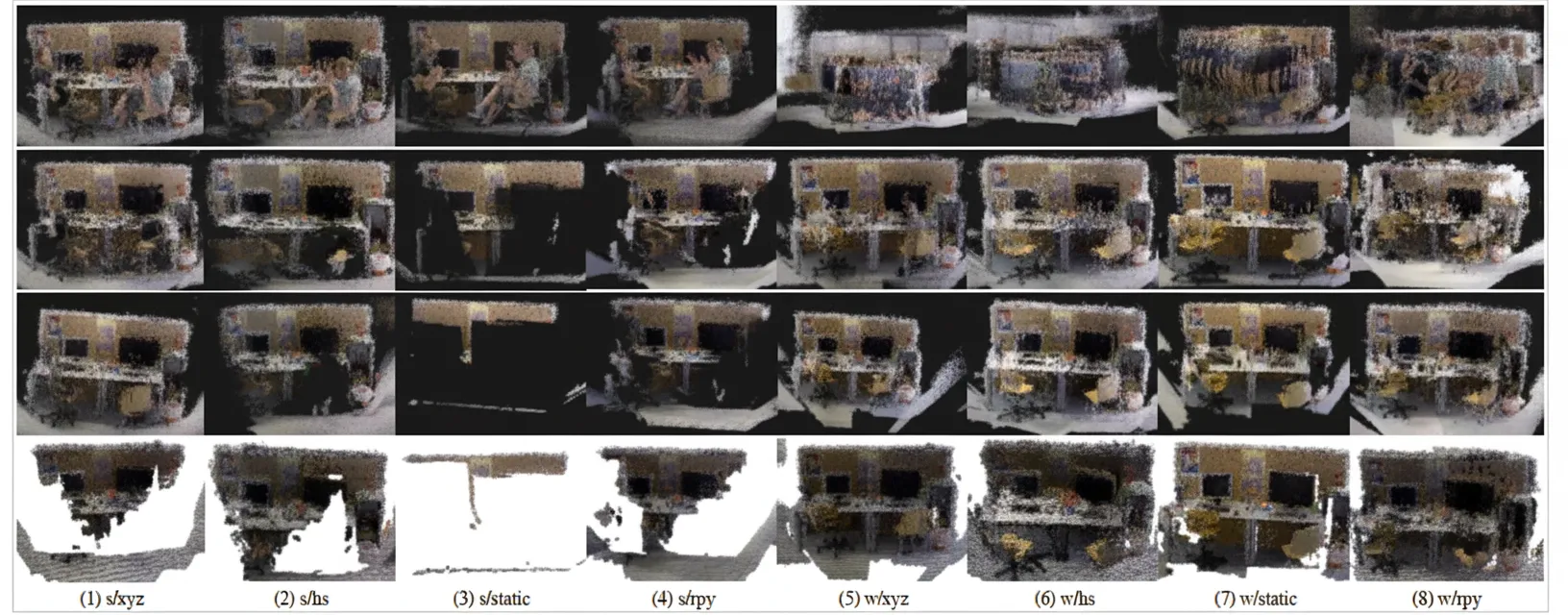
Multi-level mapping for visual SLAM in dynamic scenes, building static dense point cloud, octree, plane and object maps using semantic detection, DBSCAN and data association.
In the rapidly evolving field of electronics, the Robotics & Artificial Intelligence category serves as a comprehensive resource for engineers, hobbyists, and innovators seeking to harness cutting-edge technologies. This section delves into the intersection of mechanical systems, intelligent algorithms, and electronic components, offering practical knowledge to design and implement solutions that drive automation and smart functionality. From foundational concepts in robotic hardware integration to advanced AI-driven control systems, our articles cover a wide spectrum of topics. Readers can find detailed guides on selecting microcontrollers for robotic arms, tutorials on embedding machine learning models into embedded systems, and insights into optimizing sensor networks for real-time data processing. Best practices are emphasized throughout, including strategies for power management in autonomous devices and ensuring reliability in AI-enhanced circuits. These resources highlight technical relevance, such as using PCB layouts to support neural networks or integrating vision systems for object detection, all grounded in industry standards. The practical value of this category extends to real-world applications, where robotics and AI transform industries like manufacturing, healthcare, and consumer electronics. For instance, learn how to build AI-powered drones for precision agriculture or develop intelligent prosthetics that adapt to user movements. By addressing challenges like scalability and interoperability, our content equips you with actionable strategies to innovate effectively. Our curated selection of articles provides in-depth exploration of emerging trends, such as edge AI computing and swarm robotics, fostering a deeper understanding of how these technologies integrate with PCB design. Whether you are prototyping a simple bot or scaling complex AI systems, the knowledge here empowers you to push boundaries and achieve tangible results in your projects.
Multi-level mapping for visual SLAM in dynamic scenes, building static dense point cloud, octree, plane and object maps using semantic detection, DBSCAN and data association.
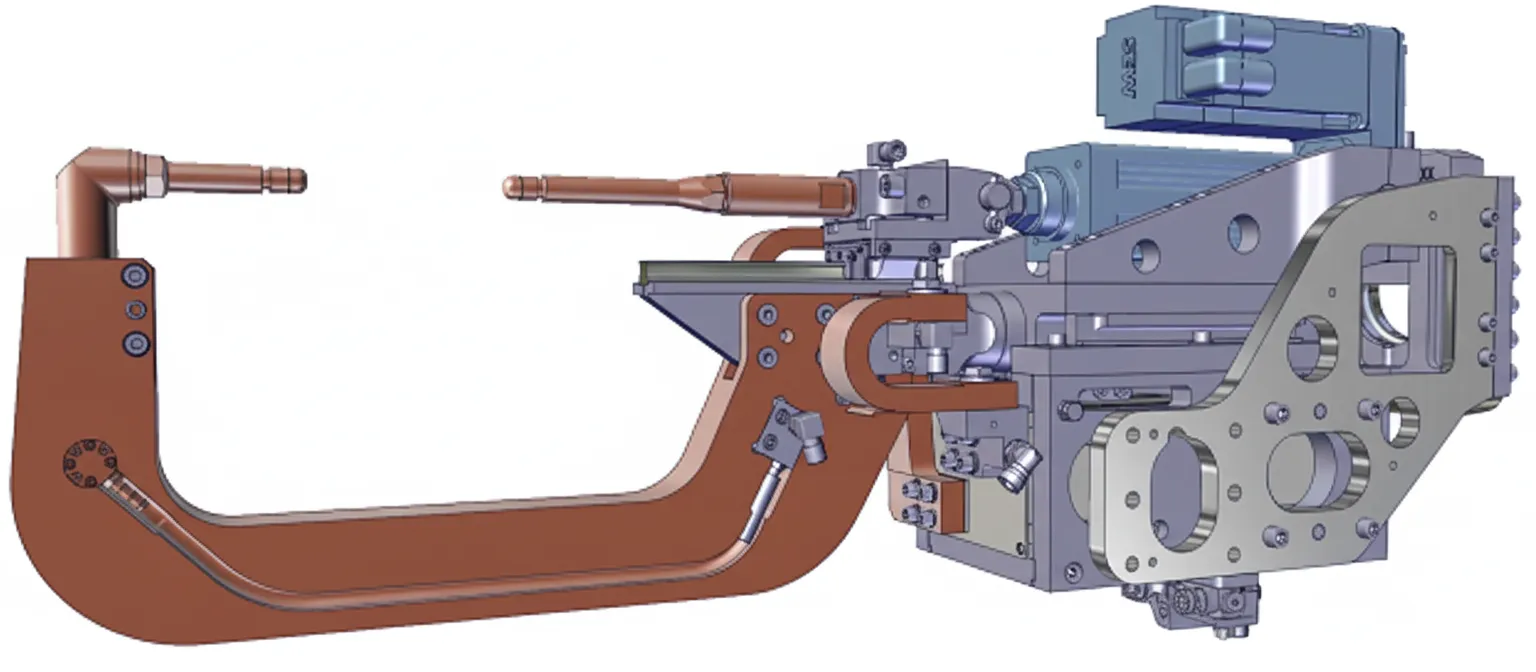
Learn essential preparation steps before aligning robot electrode arms on C-5000 welding tongs. Discover safety procedures, component positioning, adjustment methods, and how reliable PCB electronics, motor control, and power systems support high-precision robotic welding in automotive and industrial manufacturing.
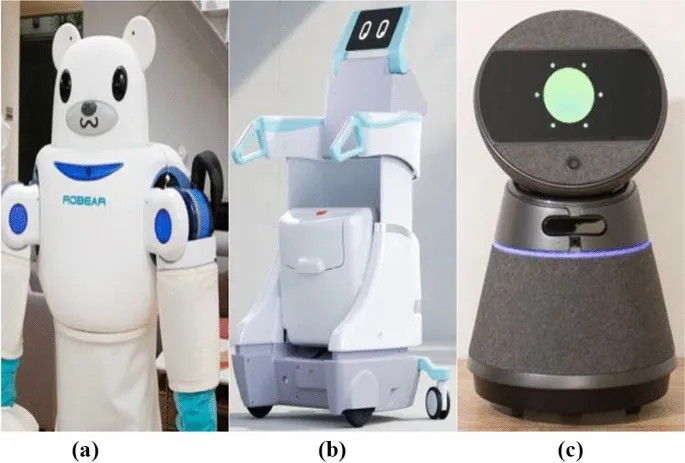
Survey of humanoid robots and embodied intelligence: AI large-models, perception-to-action, market demand from labor shortages, technical barriers and practical breakthrough directions.
Discover the core technologies powering robotic vacuum cleaners — from LiDAR, SLAM, ultrasonic and infrared sensors to motor control, path planning, and battery management. Learn about electronics design challenges and how advanced PCBs enable reliable navigation, sensing, and power systems in smart home robotics.
Explains relationships among industrial robots, PLCs and automation, covering robot controllers, PLC roles, motion control challenges, and integration in production lines.
Overview of Oki flexible cable movement modes (bending, linear, twisting), detailed bending/linear/torsion test results, and guidance on torsion cables and cable selection.
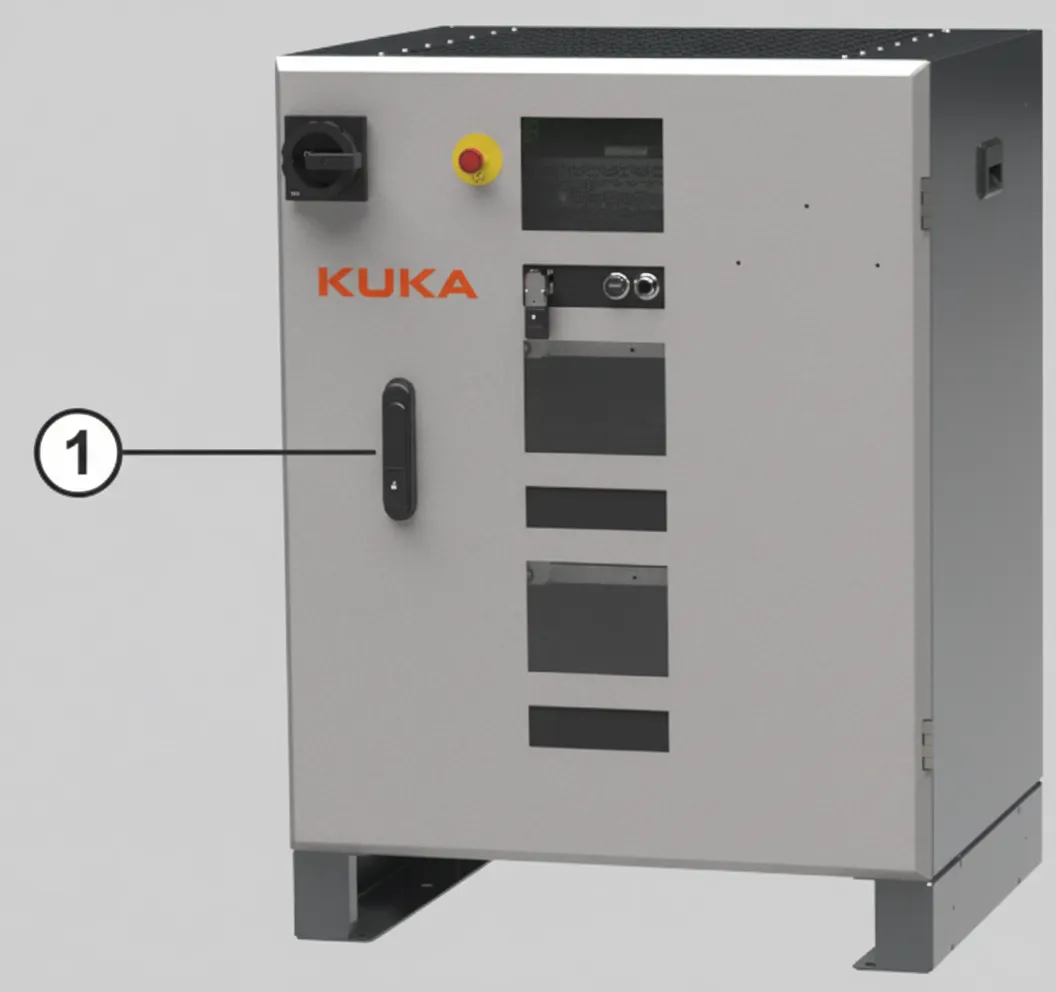
KUKA KR C5 robot controller overview and step-by-step procedure to replace the external 60 GB SSD, including shutdown, front-door access, and SSD removal steps.
Overview of SLAM fundamentals, core steps (perception, localization, mapping) and implementation methods, focusing on probabilistic SLAM and Bayesian estimation challenges.
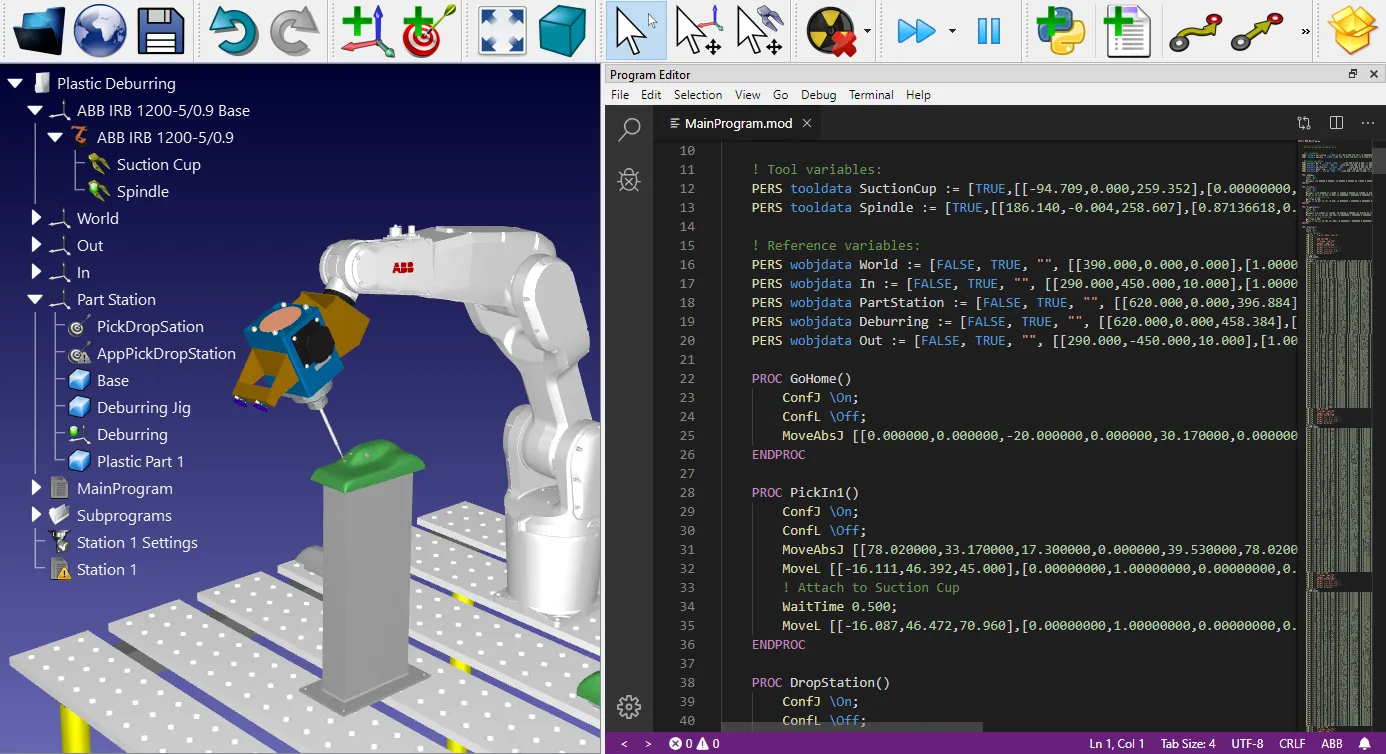
Overview of ABB programming commands: using Proccall to invoke routines from the teach pendant and the stop instruction to halt program execution.
Technical guide to KUKA safety signals, covering Profisafe, CIP-Safety and X11 connector wiring, dual-channel assignments and X11 pin mappings for KR C4 cabinets.
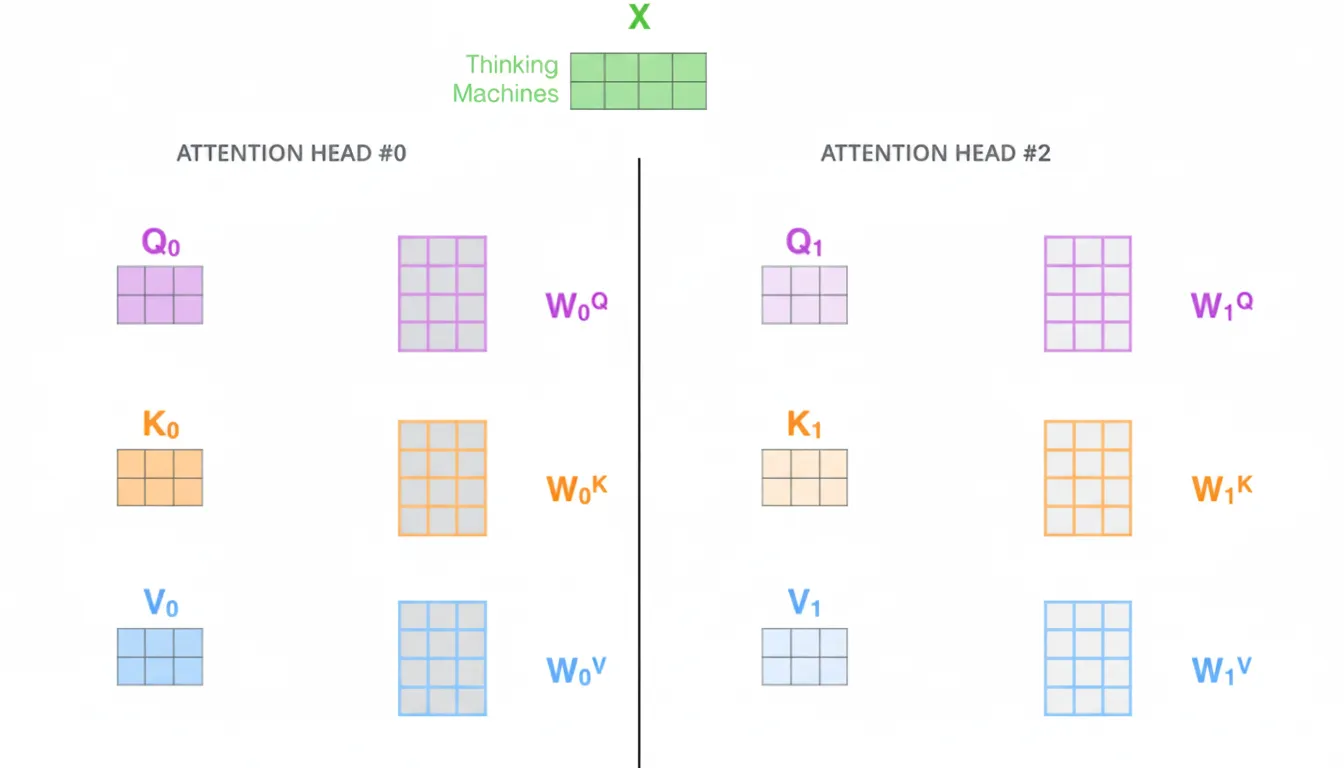
Detailed implementation of the Transformer model covering architecture, self-attention, multi-head attention, positional encoding, masking, feed-forward networks.
Collection of Python implementations of robotics algorithms for autonomous navigation: localization, SLAM, mapping, path planning, and path-tracking examples.