In-vehicle Ethernet: reducing wiring and supporting more data
If you have ever seen the tangled wiring harnesses inside a vehicle, you know how large they can be: hundreds of wires bundled together with zip ties. These bundles occupy valuable chassis space, add unnecessary weight, and create multiple potential failure points. New high-bandwidth cabling based on enterprise networking standards can replace those bundles with a single thin cable, providing more bandwidth than all the old wires combined.
Summary
In-vehicle Ethernet promises to simplify vehicle wiring and support significantly higher data rates, enabling the data demands of modern sensor and infotainment systems.
Ethernet and the software-defined vehicle era
The software-defined vehicle (SDV) era is approaching. As more functions of a vehicle are implemented in software, the possibility of changing vehicle behavior or updating driving features via downloaded code becomes increasingly likely.
More software means more data. High-definition sensors that help vehicles perceive their environment generate large amounts of information every second. All these data must be transported within the vehicle as continuous streams that quickly add up.
Modern infotainment systems can stream dozens of audio channels or multiple high-definition video feeds to rear-seat displays. In other words, a lot happens underneath the exterior of the next vehicle you drive, and all of it requires more bandwidth. Ethernet is the solution.
What is Ethernet?
In common use, Ethernet often refers to the cable used to connect a modem to a wireless router or to directly wire a PC or console for lower latency gaming. Formally, Ethernet is not a single cable type but a networking standard that defines how multiple devices communicate reliably.
Typical home Ethernet cables contain several pairs of smaller wires twisted together, known as twisted pair cable. Each end usually terminates in an RJ45 connector. Standards such as 100BASE-T or 1000BASE-T refer to 100 Mbit/s and 1,000 Mbit/s speeds respectively. Gigabit Ethernet can transfer a 4K movie in roughly four minutes.
For modern in-vehicle data, even gigabit speeds can be insufficient. Faster links require different cable and connector types optimized for automotive use. These cables are thinner, lighter, and lower cost than bulk harnesses. Newer automotive Ethernet standards, including 2.5G, 5G, 10G, and 25G, provide the bandwidth needed for next-generation SDV applications. For example, 25G is sufficient to transfer the same 4K movie in about eight seconds, and it supports bandwidth-hungry use cases across the vehicle.
The cable types here are designed not only for speed but also for automotive environments. They can be a twisted-pair cable or a fiber, using automotive-grade connectors to provide the bandwidth SDV systems require.
From early deployments to modern architectures
Vehicle Ethernet is not entirely new; early implementations date back more than a decade. The technology first appeared in production vehicles around 2008, initially for diagnostic ports and for infotainment front-seat-to-rear-seat links at tens of megabits per second, using 100BASE-T cabling similar to that used in homes.
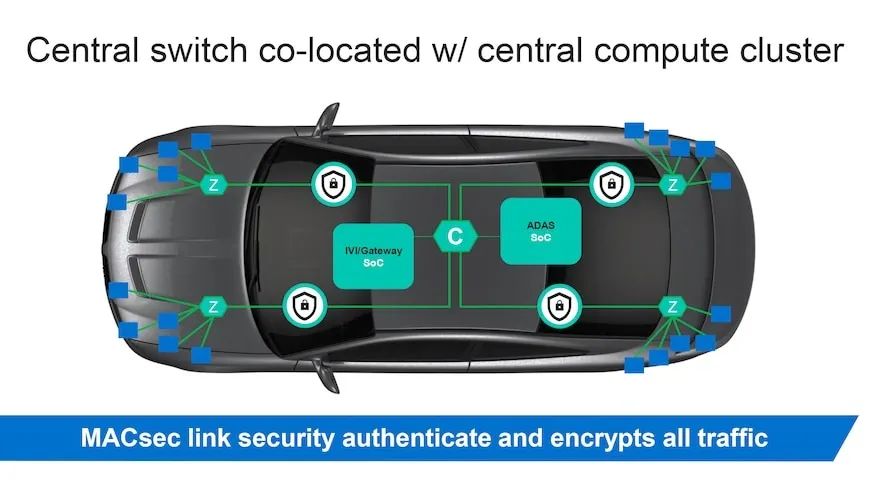
Beyond cable standards, a full in-vehicle network requires switches and routers to interconnect sensors and processing units. Proper placement of switches inside the vehicle minimizes required wiring while ensuring all devices can communicate. This configuration, known as network topology or architecture, becomes critical as systems proliferate.
From domain control to zonal architectures
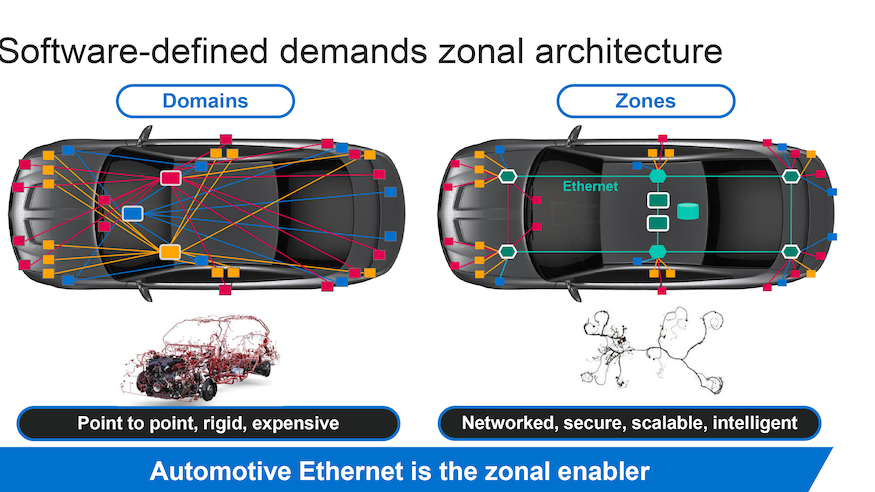
Traditionally, vehicles used a domain architecture: each major function, such as lighting or infotainment, was treated as a separate domain controlled by multiple distributed microcontrollers. As new features were added during a vehicle's lifecycle, additional wiring was added to the harness.
This approach led to large amounts of wiring routed throughout the vehicle. With Ethernet, the vehicle can be organized as a set of interconnected zones, each containing sensors and devices. Each zone uses an Ethernet switch to connect devices locally, and a single thin Ethernet trunk aggregates traffic to form the vehicle backbone.
By sharing a common network, the vehicle design simplifies: instead of dozens of small, dedicated ECUs distributed around the vehicle, fewer more powerful central processors can handle heavy digital workloads for the entire vehicle.
The zonal approach also enables new behaviors characteristic of SDV. For example, current vehicle cameras often use point-to-point links from a sensor to a single consuming system, so a rearview camera is only available to the rearview display. When cameras are networked via Ethernet, software can reuse camera feeds in new ways, such as turning a rearview camera into a dashcam by streaming the footage over the network. Such features can be delivered via over-the-air updates.
Industry surveys show a significant shift to zonal architectures is expected in new vehicles, indicating broad adoption beyond luxury segments. As a result, demand for higher bandwidth is increasing: where 100 Mbit/s was once sufficient for domain-based infrastructure, devices below 2.5 Gbit/s are increasingly unacceptable for modern vehicles.
Automotive-grade reliability
Many core technologies for in-vehicle Ethernet are based on enterprise networking hardware, but automotive applications require much higher reliability. Failures in a bank's network hardware may cause disruption, but failures in vehicle systems—especially ones related to active safety—can have life-or-death consequences.
Reliability is commonly measured in DPPM, defects per million parts. Consumer networking equipment may have DPPM in the hundreds to thousands, whereas automotive targets are often below 1 DPPM.
Even with higher manufacturing standards, failures can occur. Redundancy techniques, such as dual-core lockstep processors in switches, help: two processors perform the same computation and their outputs are compared. If discrepancies occur, algorithms can use the functional processor output to ensure continued system operation.
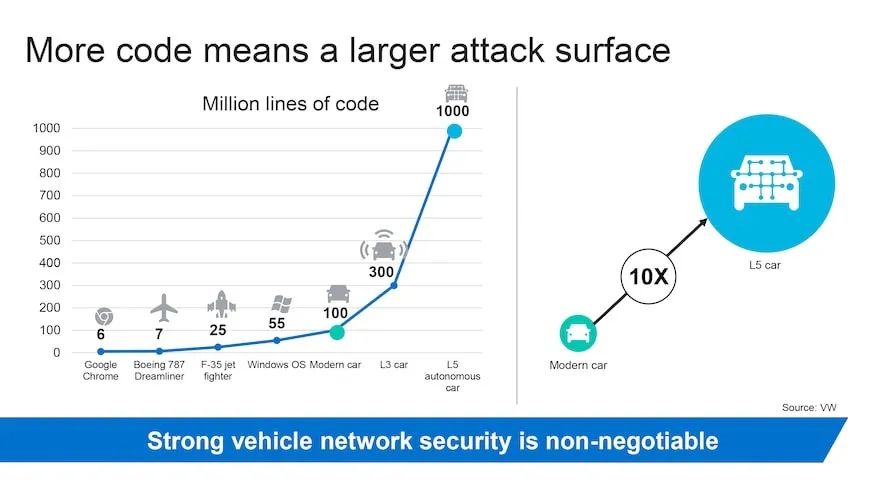
Improving vehicle security
With many components communicating on a single network, security concerns arise. Historically, domain-based wiring provided a degree of isolation: a compromise of one domain made it difficult to affect other domains. Consolidating systems onto a single Ethernet network increases the risk that a compromised component could access other systems.
Automotive networks mitigate such risks through stronger security measures. One key defense against man-in-the-middle attacks is hardware security modules (HSMs). HSMs generate digital keys in the vehicle and perform encryption and digital signing of in-vehicle data. These modules bring enterprise-grade cryptographic protections to automotive networks.
Cost and benefits
Deploying automotive-grade Ethernet, switches, and HSMs, and developing the software to operate them may seem expensive compared with traditional CAN-based links. Ethernet hardware generally costs more than slower legacy links. However, Ethernet is a fundamental building block for architectures that support on-demand features and advanced automated driving functions that require high-speed communication.
While the network hardware cost is higher, it is small compared with the cost of modern sensors such as 3D lidar. In many cases, moving from a domain to a zonal architecture and removing redundant components can yield cost savings. Centralizing compute resources by eliminating many discrete ECUs can reduce vehicle-level costs. Some suppliers estimate that adopting zonal Ethernet architectures could lower in-vehicle network costs by around 10% and reduce the number of required components such as microprocessors by roughly 20%, which is relevant given ongoing component shortages across the industry.
Shifting to in-vehicle Ethernet can therefore make vehicles smarter, lighter, and potentially less expensive and easier to source in the future.


