Overview of the 3D6 Rotor Structure
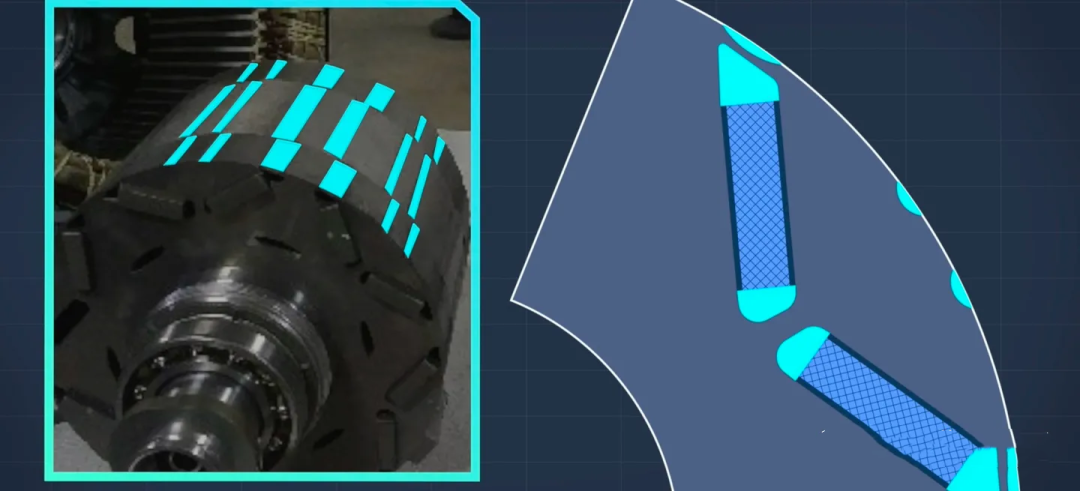
First, Tesla 3D6 motor rotor uses a conventional single-V permanent magnet arrangement, with a three-segment scheme to optimize noise. The middle segment is twice the width of the edge segments.
Earlier BYD rotors use six V-shaped segments (the central thicker part is actually two levels, so it appears as five but is actually six).
This pole-shift design has been discussed before, but the segmentation and lamination details are not as refined as BYD's and Huawei's rotors. The previous-generation Tesla motor had very detailed noise-reduction auxiliary grooves on the rotor side, arranged as deep and shallow grooves: the large grooves sit at the surface magnetic bridges of the V-shaped magnet slots, while the small grooves are positioned near the pole center. On the 3D6 rotor we examined, that detailed deep-shallow pairing was not apparent; instead, Tesla uses single-radius quieting grooves. Combined with the simplified three-segment design, Tesla's overall level of mechanical detail is less refined than those two competitors.
Cross-Section and Internal Oil Channels
To show internal details more clearly, we cross-sectioned the rotor shaft using wire EDM.
Before cutting, reports indicated that the previous-generation Tesla motor shaft was designed so that oil first entered the center, was flung outward by a protrusion to the inner wall, and then cooling oil was sprayed out through four small holes for heat dissipation.
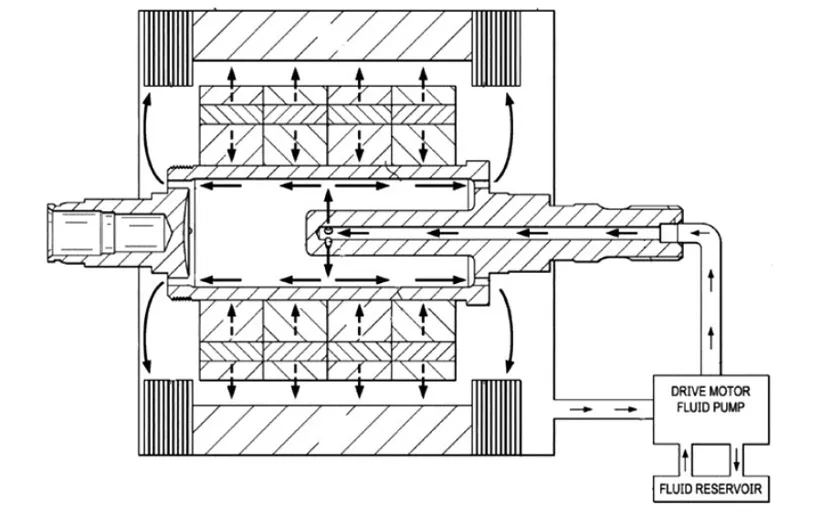
Motor low-efficiency heating mode: lubrication oil and heat flow schematic
After cutting this unit, we found Tesla has reverted to a straight-through hollow-core structure similar to BYD and Huawei. Once oil reaches the end ring, it can immediately reach the rotor-side oil ejection holes to cool the rotor. However, Tesla's routing is still less direct than BYD's: BYD's oil channels can flow alongside both sides of the permanent magnets, while Tesla's oil mainly must pass through central weight-reduction holes. Huawei could, in principle, match BYD's cooling capability but in some units the channels were filled with adhesive. Overall, all three designs are capable of core cooling of the rotor.
Regarding the change in Tesla's rotor oil-channel design, one hypothesis is that the earlier protruding shaft core was intended to control oil agitation and limit spray flow, so injection points had to start from the center to ensure even cooling. The new design suggests that higher oil flow can be pumped in directly from one side. Supporting this view is that the 3D6 motor appeared alongside Tesla's fourth-generation thermal management system, so the core was likely redesigned to increase internal oil flow and strengthen the motor's low-efficiency heating mode capacity.
Low-efficiency heating mode is sometimes described as motor stall heating; its heat generation per unit time can be much higher than a PTC heater. Tesla's previous designs were conservative in this respect. The shift in shaft-core routing closer to BYD and Huawei suggests Tesla solved the oil agitation issue that arises with large oil injection volumes. BYD and Huawei reportedly use low-viscosity lubricants to support such flow designs, and Tesla appears to have recognized the benefits of increased oil flow. This design evolution also impacts multiple mechanical aspects of the motor.
Earlier consulting reports showed previous-generation Tesla motors with a protruding core design.
After our disassembly and cutting, we found that none of the three manufacturers currently use the protruding oil-ejection design.
Comparison of Core Mechanical Designs
We can compare some core mechanical design choices across the three motors. For permanent magnet arrangement and magnet preparation, BYD and Tesla use regular-shaped sintered NdFeB single-piece magnets. Huawei uses segmented magnets, but testing shows they behave similarly to single-piece magnets in practice. In this regard, the three motors are not very different. Only Tesla does not use a dual-V magnet arrangement.
On lamination thickness, BYD uses the thinnest sheets; the other two are similar. All three use advanced processing. BYD has more fixation points on the magnet sides; the other two have fewer. Each design shows clear assembly interlocks, so eddy-current heating is a significant challenge. The segmented pole-shift layout is six layers for Huawei and BYD, and three layers for Tesla; Tesla's approach is relatively simpler. Overall laminations are comparable across the three, with BYD slightly better. For stator flat wire layers, Tesla uses 10 layers, more than BYD; at high-power output Tesla has an advantage, while at low speeds in urban conditions BYD may have an edge.
Huawei DriveOne uses round-wire stators emphasizing high power; overall efficiency is lower than BYD and Tesla, so Huawei is slightly behind in this area. For pole-pair and slot counts, BYD uses 8 poles and 72 slots, while Huawei and Tesla use 6 poles and 54 slots.
Electromagnetic Effects: Cogging Torque and Harmonics
Pole-pair and slot counts introduce many evaluation dimensions. One technical point worth noting: most permanent magnet synchronous motors are driven by sinusoidal AC, but the actual signals seen by the rotor are not ideal sinusoids. The air gap and magnetic field distortions introduce harmonics into the rotor current and voltage, which manifest as noise and vibration for the user.
At standstill, the rotor tends to rest at certain preferred positions because the stator slots give rise to an asymmetrical magnetic reluctance path. Magnetic field lines will pull the rotor toward positions of minimum reluctance. During rotation, field fluctuations in the tooth regions at both ends of the magnets grow larger. This effect is similar to repeatedly driving over a speed bump; the torque fluctuates. We call this cogging torque.
Evaluation factors commonly include the greatest common divisor and least common multiple of slot count and pole count. In our three motors, their slot and pole counts are directly divisible, so the relevant evaluation factor reduces to their rotor pole count and slot count; the least common multiple naturally equals the slot count. BYD's 8 poles and 72 slots yield a higher value, while Tesla and Huawei at 6 poles and 54 slots are lower. A lower value increases the frequency of slot harmonics and worsens cogging-induced vibration and noise.
However, according to the speed equation for permanent magnet synchronous motors, fewer pole pairs also mean lower iron losses, because iron loss generally increases with electrical frequency across most speed ranges.
For the 6-pole Tesla and Huawei motors, a 16,000 rpm mechanical speed corresponds to a similar electrical frequency as BYD's 8-pole at around 12,000 rpm. This helps explain why BYD invests effort in precise rotor lamination: optimizing iron loss matters at those operating points.
With 54-slot, 6-pole layouts like Tesla and Huawei, manufacturers often choose to increase current to raise speed and torque, which can be more acceptable to users. BYD's 8-pole, 72-slot design complicates motor control but effectively parallels more electromagnetic poles to deliver output. Peak torque can be increased relatively easily, and high power can be achieved without relying solely on very high current. BYD's higher reduction ratio around 11 also supports this design direction, pointing toward prioritizing efficiency and low noise.
Redundancy and Thermal Considerations
From a redundancy standpoint, all three motors have room to increase peak speed, but it may not be necessary. For BYD's configuration—16,000 rpm with about 10.8 reduction—the design likely favors broader applicability over maximizing peak speed.
High currents produce heat, but Tesla mitigates this with rotor core oil cooling and stator spray channels, which allows Tesla to use a reduction ratio of 9.3. Huawei's round-wire motor should not be dismissed solely for that choice; Huawei's strengths include inverter module reliability and modular supply-chain thinking. As an analogy, BYD's motor is like a smooth 8-cylinder engine: quiet and smooth but tuned for efficiency, while Tesla and Huawei resemble smaller, higher-revving engines that can be more aggressive but sometimes at the cost of higher energy consumption.
Overall, from a mechanical design perspective, Tesla leans toward sportiness while BYD favors efficiency and low noise.
Conclusion
Comparing rotor topology, cooling channel routing, lamination precision, slot and pole counts, and stator winding strategies shows distinct engineering trade-offs. Tesla's 3D6 simplifies some mechanical details but seems to prioritize higher current capability and thermal management to support different operating modes. BYD emphasizes fine lamination and noise control; Huawei balances modularity and power density with different winding choices. Each path reflects different priorities in motor performance and system integration.


