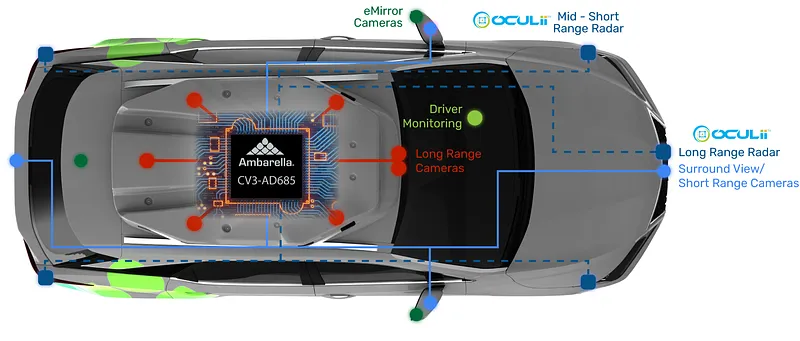
Vehicle electrification has increased the number of high- and low-voltage electrical components in the powertrain (see Figure 1).
VCU role and system view
The vehicle control unit (VCU) acts as the drive system's central controller. Mature system software plays an important role in improving operational efficiency, reducing energy consumption, and increasing robustness of post-fault handling. As the core controller of vehicle drive coordination, the VCU is responsible for whole-vehicle state coordination and implementing driver torque requests. The completeness of VCU software directly affects vehicle stability and driving safety. With the increasing adoption of domain consolidation, more functions are being integrated into the VCU, such as AC/DC vehicle-side charging control and chassis-related electric all-wheel-drive control.
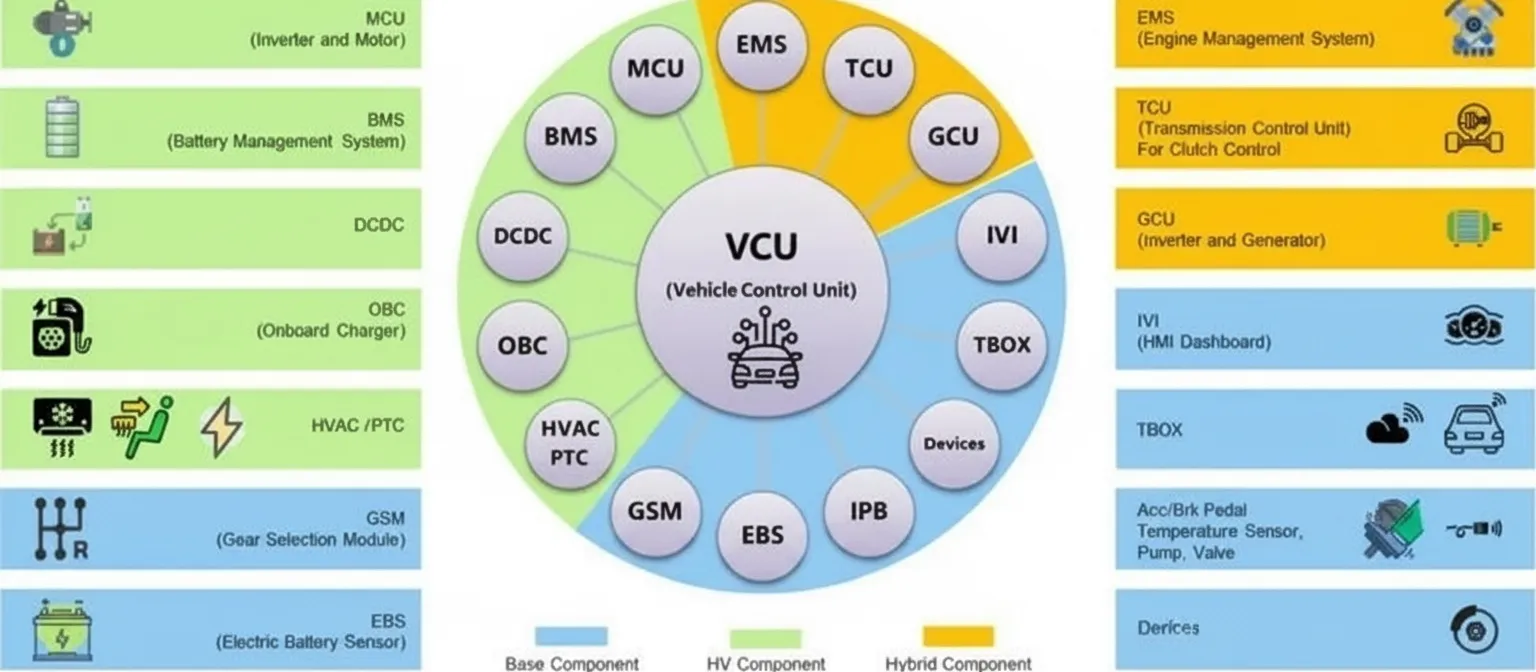
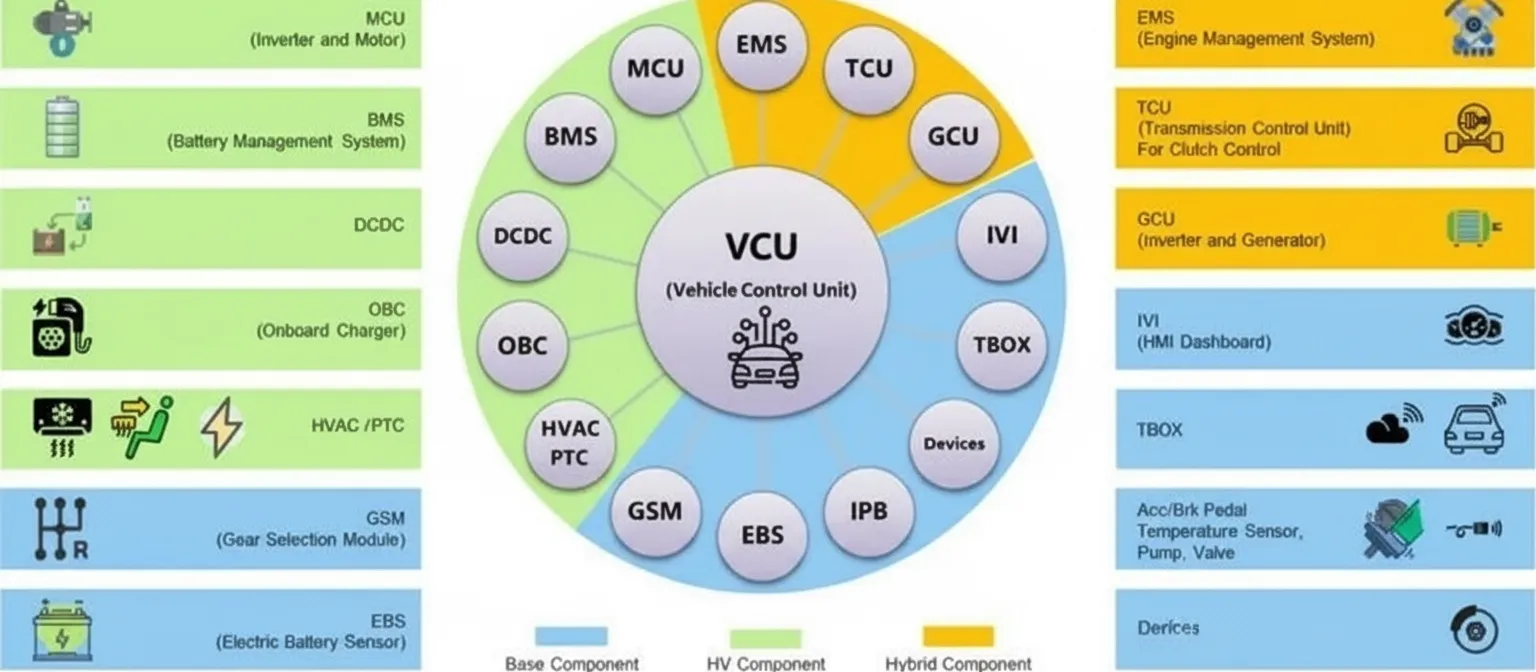
From a functional perspective, VCU features can be grouped into vehicle system, powertrain, electric power system, thermal management, and system functions such as OBD diagnostics, communications, and safety monitoring. The main VCU functions are illustrated in Figure 2.
VCU software core capabilities
Based on multiple production projects and years of system knowledge and software validation, the VCU software now provides complete and configurable solutions in the three core domains of torque, electric, and thermal. This article focuses on the vehicle drive functions related to torque. Subsequent articles will cover the electric and thermal domains.
Multi-mode vehicle operation management (hybrid)
For hybrid vehicles, the operation mode decision and mode switching control support pure electric, series range-extender, and parallel drive modes (see Figure 3).
Whole-vehicle mode decision uses ECMS (Equivalent Consumption Minimization Strategy) to select the energy-minimizing operating mode across various conditions and to determine the optimal energy split between motor and engine for improved performance and economy. For example, at low and medium speeds the range extender can generate electricity so the engine operates in an efficient region to supply the power system; at high speed the engine and motor jointly drive the vehicle to satisfy both performance and economy requirements. Compared with widely used rule-based energy management strategies, ECMS can deliver better fuel savings; compared with global optimization or fully operating-condition-adaptive strategies, ECMS is easier to apply in engineering projects.
When operating conditions change and a mode switch is required, the mode transition control ensures the driver’s torque demand is met while coordinating engine, range extender, drive motors, and clutches for quick and smooth transitions (see Figure 6).
Torque management based on component physical hierarchy
Torque management coordinates torque and braking demands from the driver and driver-assist functions, and, based on vehicle operating mode and mode-switch outputs, allocates torque requests to drive components (engine, generator, front drive motor, rear drive motor) so they accurately respond to all torque sources.
The implemented torque management supports a flexible, extensible torque structure suitable for pure electric and hybrid projects and for two- or four-wheel-drive configurations. Using a component-level physical hierarchy makes it easier to extend the method to other hybrid/electric topologies (Figure 7).
Four-wheel drive control with multiple allocation strategies
The all-wheel-drive control distributes driver torque demands between front and rear axles according to the current control objectives and outputs torque commands to the front and rear drive motors. The control considers economy, performance, and handling stability, and can recognize vehicle motion trends to actively intervene in motion control, achieving continuous full-range allocation ratio adjustment (see Figure 8).
Economy-oriented distribution adjusts front and rear motor operation points during steady driving to achieve optimal system efficiency, supporting two-, three-, and four-motor architectures to reduce energy consumption and extend range.
In performance-oriented distribution, load distribution identifies current road slope and vehicle acceleration to build a front/rear axle load model and calculate the optimal torque split. During load transfer, intelligent torque allocation uses the maximum available adhesion to reduce wheel slip and improve acceleration (see Figure 9).
Traction control for off-road or low-adhesion situations actively shifts torque to the non-slipping axle when one axle slips, reducing power loss. When alternating slip between axles is detected, the system dynamically controls torque distribution to fully utilize road adhesion, improving low-speed recovery capability and reducing the sensation of power loss (see Figure 10).
Stability-oriented distribution aligns vehicle motion with driver steering intent and improves steer responsiveness. This includes steering-state monitoring and steering torque control. By adjusting front/rear torque distribution before ESP intervention, the system suppresses understeer and oversteer, reduces ESP intervention frequency during accelerating turns, and lowers braking impacts and yaw sensation, improving driver comfort and feel (see Figure 11).
The four-wheel-drive control functions are highly extensible and applicable to both EV and PHEV vehicles. This approach integrates certain power-domain and chassis-domain control functions to improve cross-domain motion control capability.