Servo and stepper motors form the backbone of precision motion control in robotics, CNC machines, automated assembly lines, and industrial equipment. These systems demand reliable electronic control through specialized drive and interface PCBs. Effective PCB design directly influences motor performance, positioning accuracy, thermal stability, electromagnetic compatibility (EMC), and long-term reliability in demanding environments.
Servo Motor Fundamentals and PCB Implications
A servo motor converts control signals into precise angular displacement or velocity. Modern systems predominantly use permanent-magnet synchronous AC servos or brushless DC (BLDC) servos. Both rely on electronic commutation and closed-loop feedback, typically via encoders, implemented on dedicated drive PCBs.
AC servo motors generally deliver superior performance with sinusoidal commutation, resulting in lower torque ripple and smoother operation compared to trapezoidal BLDC drives. This advantage stems from sophisticated PWM generation and current control loops on the drive PCB. PCB layout must prioritize signal integrity for high-frequency switching signals to prevent distortion that could increase ripple or instability.
BLDC servos offer simpler, lower-cost implementations but require careful PCB design to manage higher torque ripple and EMI. Key considerations include proper gate driver placement, low-inductance power paths, and robust decoupling to handle rapid current transitions.
Stepper Motors vs. Servos: PCB Control Architecture Differences
Stepper motors provide open-loop positioning through sequenced coil energization, making them cost-effective for many robotic and positioning tasks. Their drivers (often called “choppers”) generate precise pulse sequences, typically handled by microcontroller-based PCBs. Microstepping enhances resolution but increases demands on PCB trace quality and current handling.
Servo systems add closed-loop feedback (encoders or resolvers), requiring PCBs with high-speed differential pairs for encoder signals, robust power stages, and PID tuning support in firmware. Integrated servo drives combine motor, encoder, and controller on compact, HDI PCBs that demand advanced manufacturing techniques such as HDI stack-ups and controlled impedance routing.
Critical PCB Design Factors for Servo Performance
Signal Integrity and Feedback Loops
Encoder feedback and pulse commands travel at high frequencies. Poor PCB layout introduces crosstalk, reflections, or ground bounce, leading to positioning errors or jitter. Use controlled-impedance traces, proper termination, and ground planes to maintain clean signals. Differential signaling for encoders improves noise immunity in industrial settings.
Thermal Management and Power Electronics
Motor drives handle significant currents during acceleration and braking. Copper thickness, thermal vias, and heatsink integration on the PCB are essential. Inadequate thermal design causes derating, component failure, or reduced lifespan. High-Tg laminates and optimized copper distribution help dissipate heat from IGBTs, MOSFETs, and brake resistors.
EMI/EMC and Noise Mitigation
Industrial environments contain substantial electrical noise. PCB grounding schemes, shielding layers, and filter placement (common-mode chokes, snubbers) are critical. Proper separation of power and signal grounds, along with strategic via stitching, reduces radiated and conducted emissions that could interfere with encoder feedback or nearby equipment.
Material Selection and Reliability
FR4 suffices for many applications, but high-reliability servo drives benefit from high-Tg or halogen-free materials for better thermal stability and insulation. Multilayer stack-ups support complex routing of power, control, and feedback signals while maintaining mechanical rigidity.
Addressing Common Servo System Issues Through PCB Optimization
Jitter and instability often trace back to electrical or mechanical sources. On the PCB side, unstable feedback voltages, improper grounding, or insufficient decoupling capacitors destabilize control loops. Solutions include reinforced power planes, additional bypass capacitance near ICs, and careful routing to minimize inductance.
Brake resistors, used to dissipate regenerative energy during deceleration, require PCBs with adequate trace width, thermal relief, and mounting provisions. Selection involves matching resistance, power rating, and voltage to the drive's regenerative capacity, with installation emphasizing ventilation and secure mechanical attachment to prevent vibration-induced failures.
Positioning, Homing, and PLC Integration on PCBs
Absolute encoders retain position across power cycles, reducing homing needs, while incremental encoders require reference searches. PCB-based servo drives must support Z-phase (index) detection and offset compensation for accurate initialization.
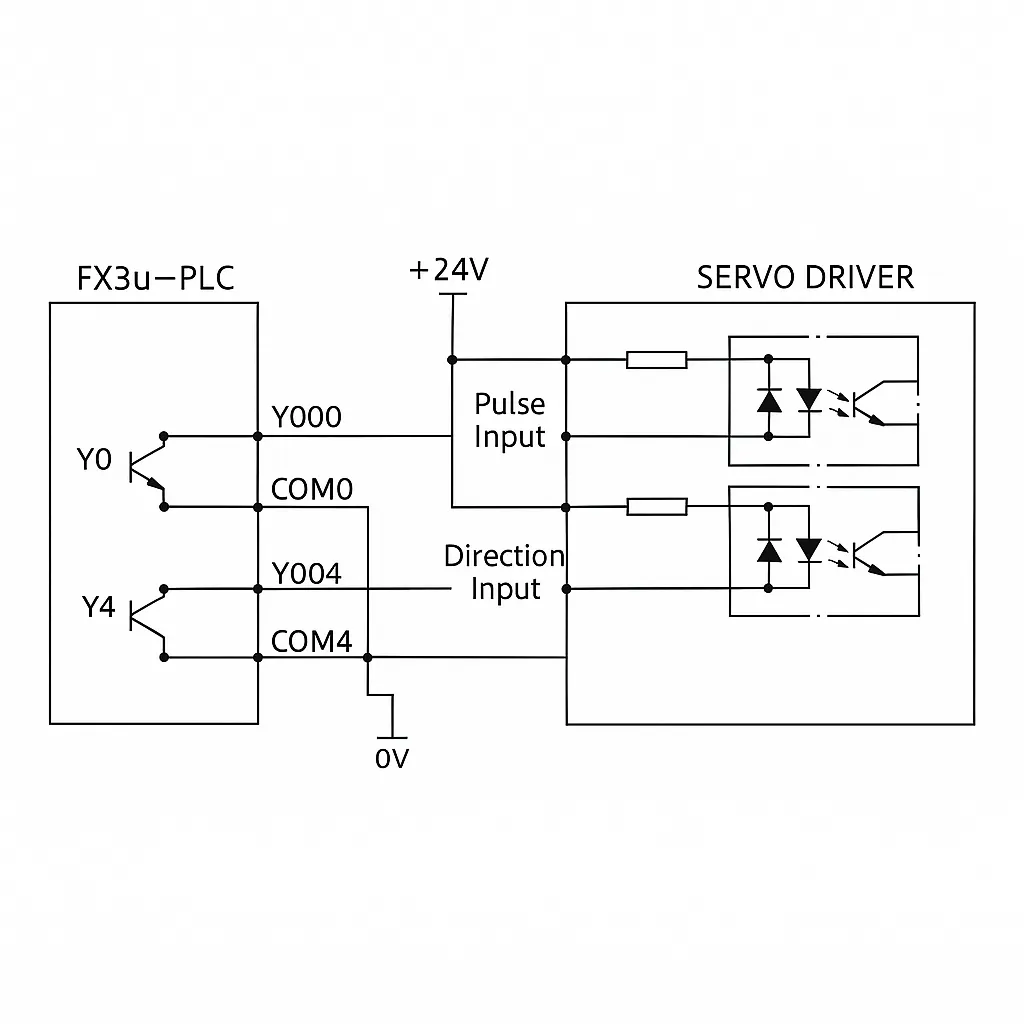
PLC homing commands (e.g., origin return routines) interface via pulse outputs and limit switches. PCB design for these interfaces includes isolated I/O, high-speed pulse generation (up to 100 kHz+), and robust limit-switch conditioning to prevent damage from overtravel. Dual limit protection—one on the PLC side, one on the drive side—enhances safety.
Relative positioning offers flexibility for repetitive tasks, while absolute methods ensure synchronization in multi-axis systems. Both benefit from low-jitter pulse generation and precise encoder interfacing on the control PCB.
Manufacturing and Assembly Best Practices for Motion Control PCBs
High-volume production of servo drive PCBs requires tight tolerances on impedance control, via filling for thermal and current paths, and rigorous testing (flying probe, ICT, functional burn-in). SMT assembly must handle mixed-technology boards with power components and fine-pitch logic ICs. Conformal coating or potting protects against dust, moisture, and vibration common in industrial deployments.
Cross-industry applications—from automotive robotics to semiconductor handling—highlight the need for application-specific PCB variants. Automotive-grade designs emphasize extended temperature ranges and vibration resistance, while medical or cleanroom systems prioritize low outgassing materials and minimal EMI.
By centering PCB engineering—layout optimization, material choices, thermal and signal integrity design, and manufacturing quality—on the unique demands of servo and stepper control, manufacturers achieve higher performance, reduced downtime, and greater system reliability. These considerations transform general motor application knowledge into actionable guidance for producing robust industrial electronics.