1. Search Superheterodyne Frequency Measurement Technique
Radar signal enters through the receive antenna and a low-noise amplifier into a microwave preselector. The microwave preselector selects radar signals within a specified passband from a dense signal environment and sends them to a mixer, where the difference between the signal and the local oscillator (LO) is converted into an intermediate frequency (IF). After IF amplification, detection, and video amplification, the output is sent to the processor. Frequency search is accomplished by varying the LO frequency. During search, to keep the desired difference between the target signal frequency fR and the LO frequency fL equal to an intermediate frequency fi, the preselector must be coordinated with the LO.
Because the IF is lower than the RF, good selectivity and high gain can be achieved; therefore sensitivity is high and selectivity is good. Also, the IF signal preserves the RF frequency and phase information with little amplitude distortion, enabling detection of wide pulse linear FM signals and phase-coded signals and simplifying implementation. For these reasons, superheterodyne receivers are widely used in frequency-domain measurements.
2. Frequency Search Modes
There are two frequency search modes: continuous search and stepped search.
2.1 Continuous Search
Continuous search can be single-pass or double-pass, as illustrated below. Symbol meanings in the figure: |f2 - f1| is the frequency search range; Tf is the frequency search period; tf is the receiver dwell time during frequency search, i.e., the time required to sweep one intercept receiver bandwidth Δfr; f0 is the signal center frequency; τN is the pulse group duration.
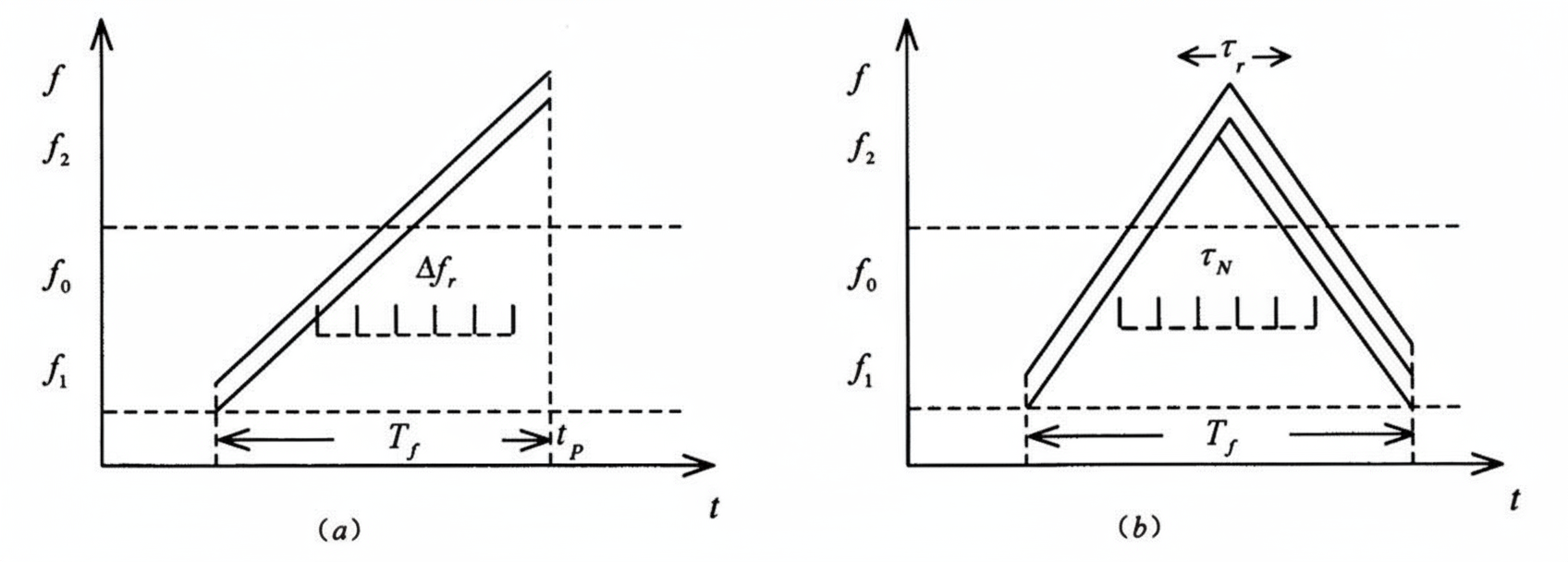
(a) single-pass continuous search; (b) double-pass continuous search
2.2 Stepped Search
The simplest stepped search uses equal-interval incremental hops, as shown in figure (a). Another approach is an adaptive stepped search, shown in figure (b): take small hops in dense radar bands and large leaps over vacant radar bands. This shortens the search period and improves detection probability. Broadband preselector superheterodyne receivers can adopt this adaptive search method.
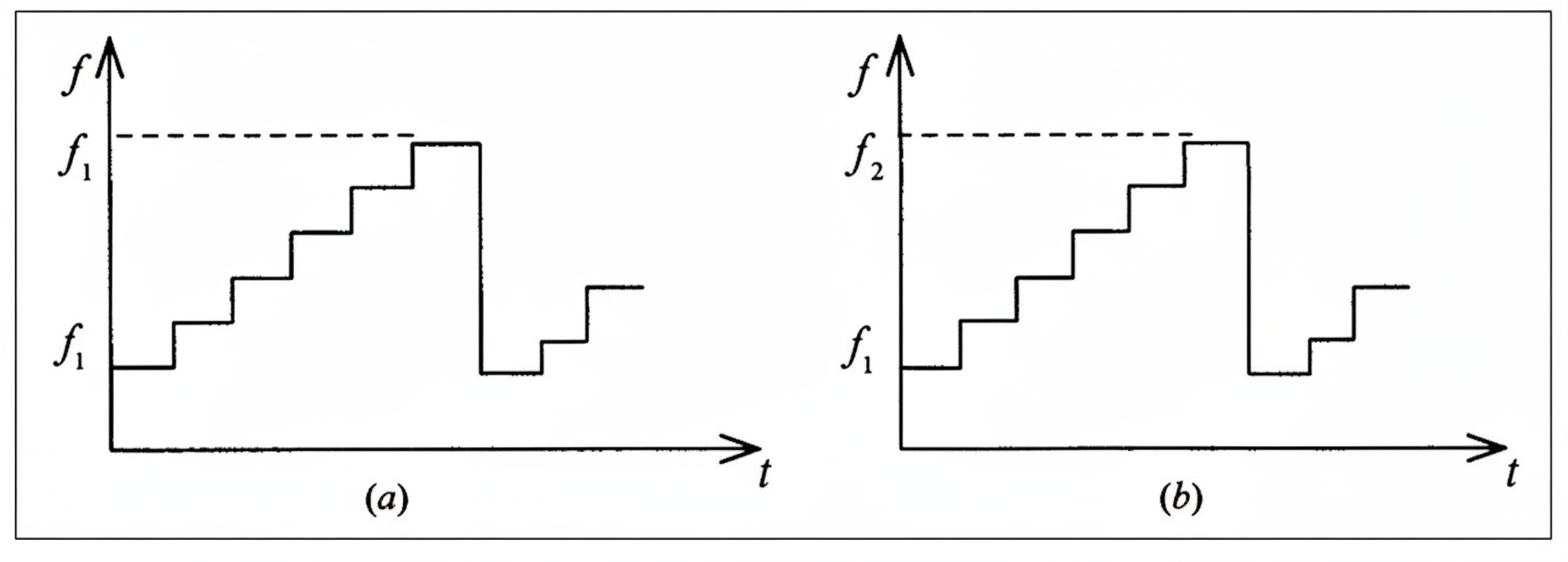
(a) equal-interval stepping; (b) adaptive stepping
3. Selection of Frequency Search Speed
Frequency search speed is generally classified into four types.
3.1 Slow Reliable Frequency Search
In each instantaneous bandwidth (ΔΩ_RF), the dwell time τ (τ ≥ Z·PRI, where Z is a coefficient) is the same. The time Tf to search the RF range Ω_RF should not exceed the radar beam illumination time Ts on the reconnaissance platform. Ts depends on the interceptor sensitivity and the radar antenna radiated power. If average sidelobe radiation can be intercepted, Ts may not be limited by antenna scan time; if only mainlobe radiation can be intercepted, Ts equals the dwell time while the radar mainlobe scans across the platform.
3.2 Fast Reliable Frequency Search
The frequency search time is not greater than the radar pulse width, so the signal exists within the measurement system bandwidth for only a short time. This method is suitable for searching continuous-wave radar or communication signals.
3.3 Agile Reliable Frequency Search
This method is based on slow reliable search but uses posterior information obtained during the search to control τ. Typically τ is set slightly greater than the radar pulse repetition interval (PRI). Initially set Z = 1; if a detection occurs within τ, Z is gradually increased until the task is completed. If no signal is found within τ, the dwell is terminated early and the search time is generally shortened.
3.4 Probabilistic Frequency Search
When the conditions for slow, fast, or agile reliable search are not met, the search is probabilistic.