Research background
Consumers demand higher quantity and quality of fruit as living standards rise. Without grading during transport and storage, fruit can deteriorate unevenly, causing significant economic loss. Fresh peaches are highly perishable and difficult to store; failure to sort them by maturity after harvest is a major cause of postharvest loss.
Manual sorting requires large amounts of labor and subjective judgment that can lead to inconsistent and inaccurate grading. Traditional nondestructive grading methods often rely on external appearance, firmness, or chemical properties, for example computer vision, hyperspectral imaging, infrared spectroscopy, and electronic nose systems. Current computer vision approaches detect a limited set of visual features and require strong correlation between appearance and maturity. Hyperspectral and infrared systems tend to be costly and complex, which limits practical deployment. Electronic nose measurements provide limited data, reducing achievable classification granularity. There is therefore a need for an efficient, low-cost maturity classification system that can automatically detect peach position and maturity on a production line to improve storage quality and reduce losses.
A research team at China Agricultural University led by Associate Professor Wang Xiang and Professor Zhang Xiaoshuan studied a peach maturity sorting system that integrates computer vision and flexible sensing technology. The system uses a retrained YOLOv4 model tailored for a peach sorting line to detect and locate peaches in real time and perform an initial maturity classification based on appearance. The method centers on flexible piezoelectric sensors that provide stress feedback upon contact for deeper classification. System verification was performed using a texture analyzer. Evaluation results indicate the proposed system can automate peach grading and sorting accurately and efficiently with low power and low cost. The combined visual and tactile maturity assessment method could be applicable to other fruits with similar characteristics.
System overview
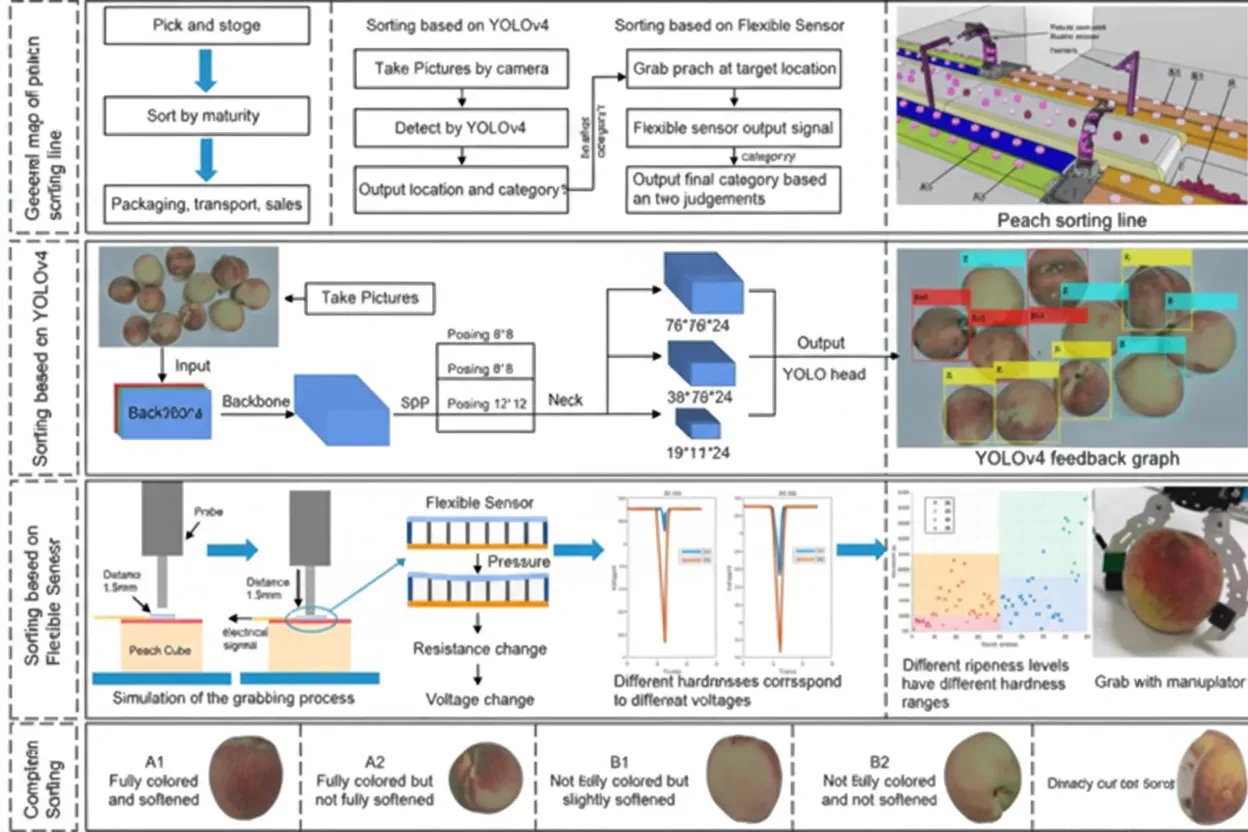
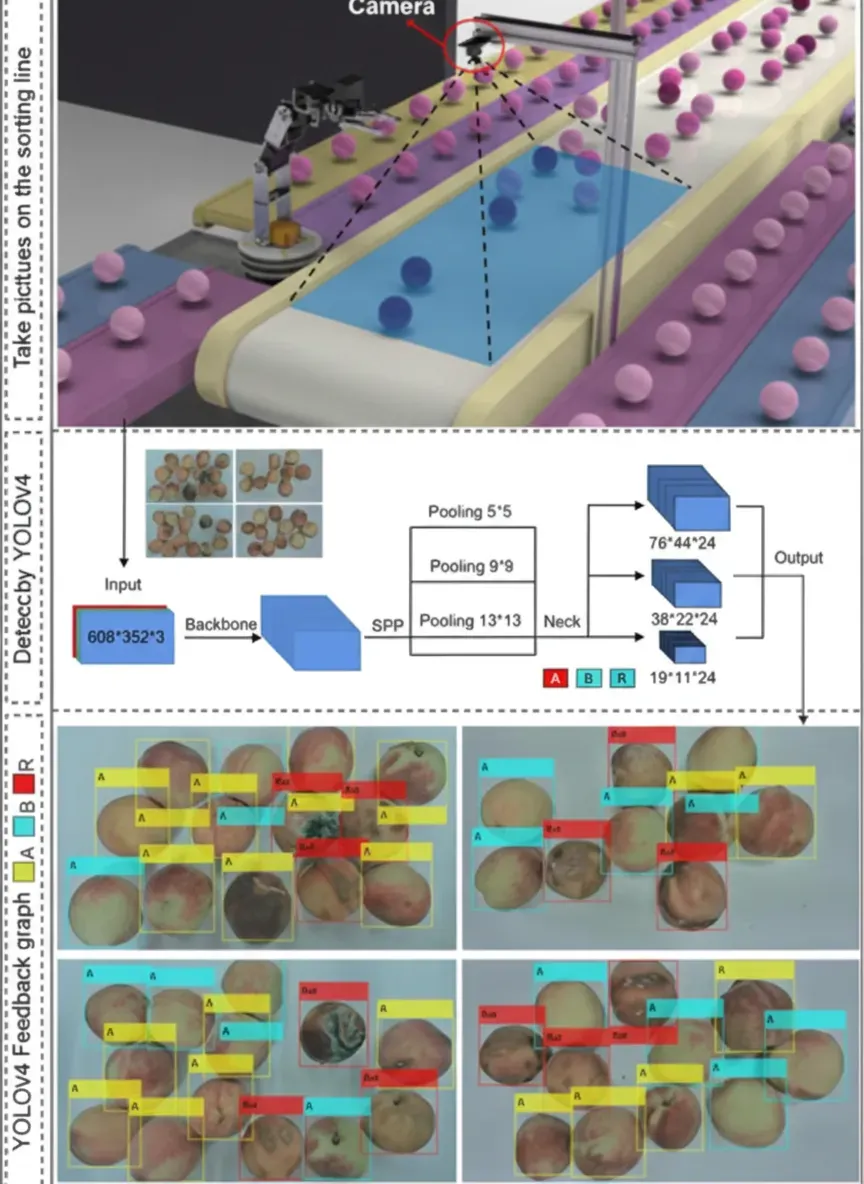
Figure 1 shows the proposed peach sorting line architecture. Harvested peaches meeting pick standards are conveyed to the sorting and packing line. A fixed camera acquires images of the conveyor. A PC processes the camera images with the trained YOLOv4 model for feature detection, object localization, and maturity classification. Fully colored peaches (Class A) and incompletely colored peaches (Class B) are picked by a robotic gripper and routed to the packing line. Rotten peaches (Class R) are discarded. During grasping, a flexible piezoelectric sensor attached to the gripper provides force feedback signals to the PC, enabling deeper classification. Fully colored peaches are further separated by a voltage threshold into fully colored and softened (A1) and fully colored but not softened (A2). Incompletely colored peaches are divided by another voltage threshold into incompletely colored and slightly softened (B1) and incompletely colored and not softened (B2).
Vision-based detection
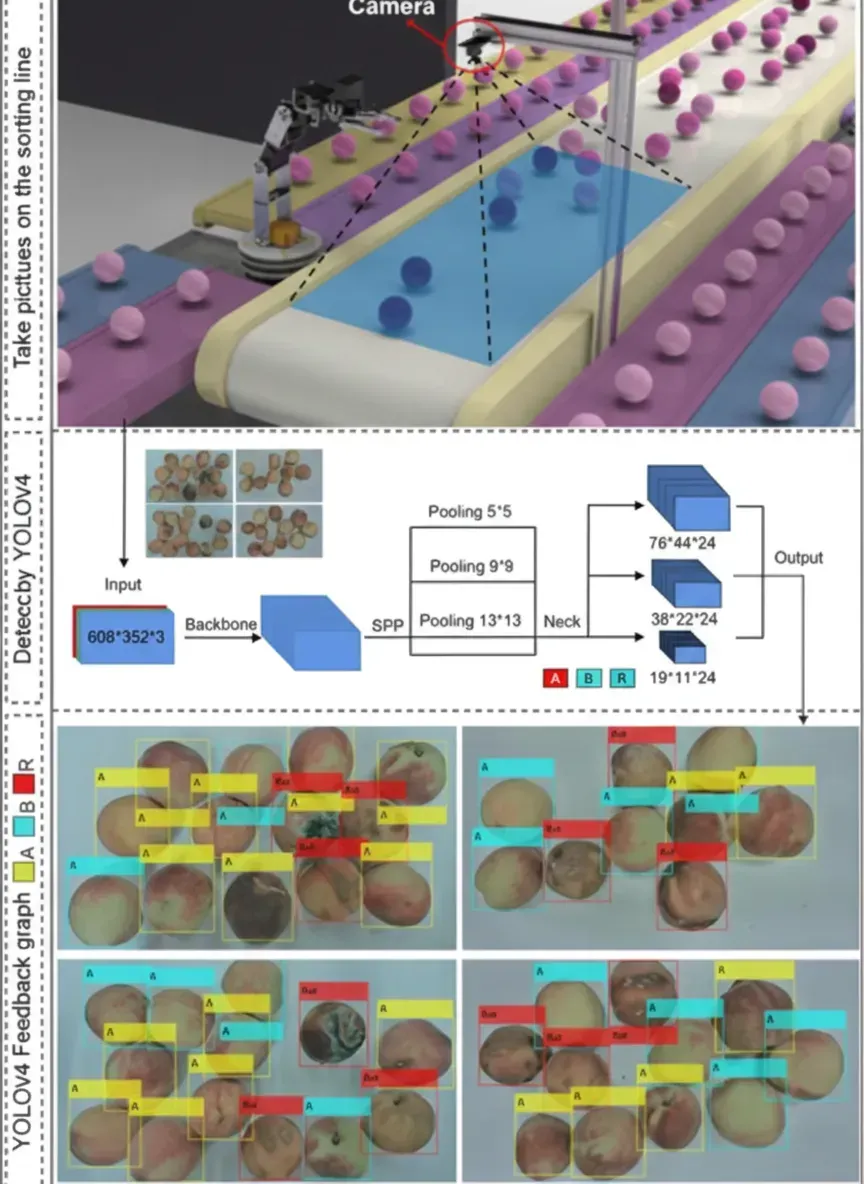
Figure 2 illustrates real-time peach localization on the production line. Images captured by the camera are processed by a PC running the trained YOLOv4 network to extract object features and return object positions and classifications. After pretraining and transfer learning, the YOLOv4 model achieved strong performance on test data: mean IoU of 0.9454 and mAP of 0.9304, demonstrating accurate localization and reliable peach classification.
Flexible piezoelectric sensor
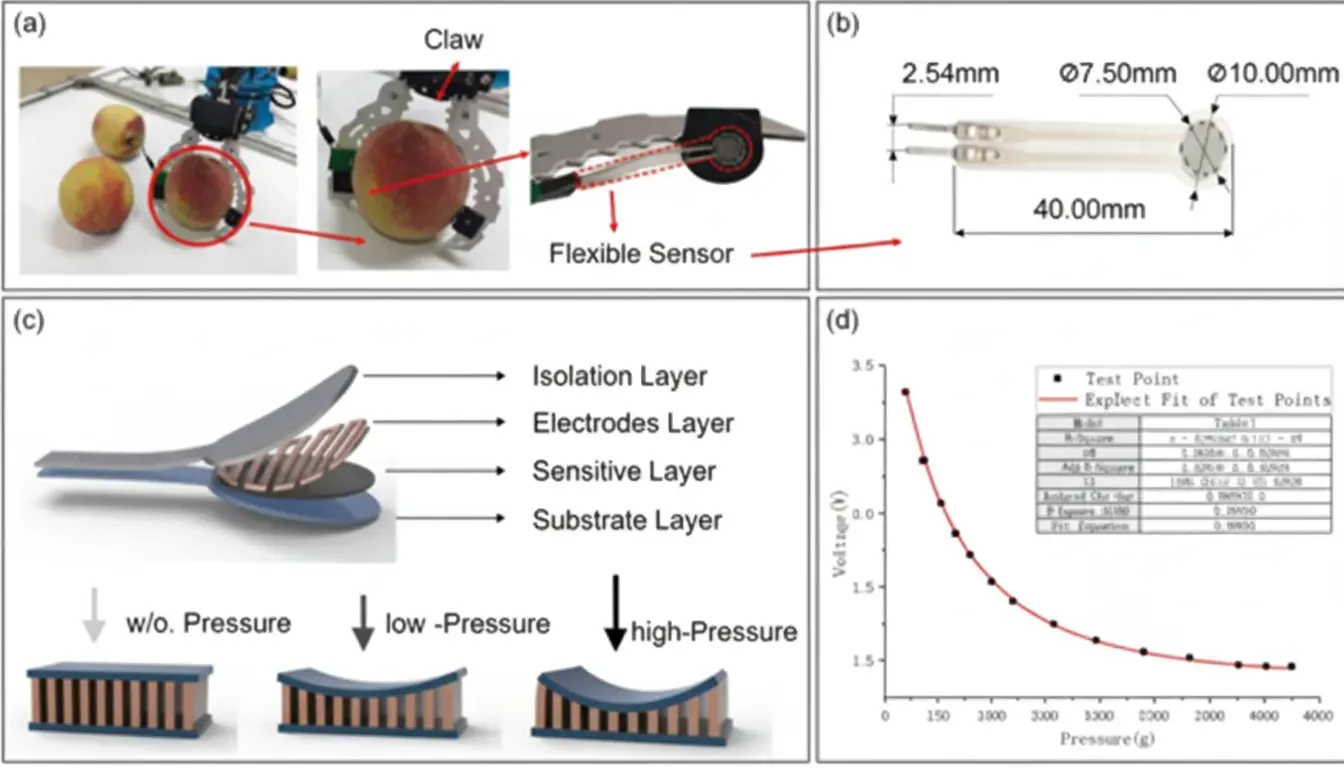
Figure 3 shows the flexible piezoelectric sensor used in this study. When the sensor contacts a peach, structural deformation inside the sensor converts applied force into an electrical signal. Different voltage feedback levels are sent to the PC, which processes the signals to provide further maturity classification.
Texture analyzer validation
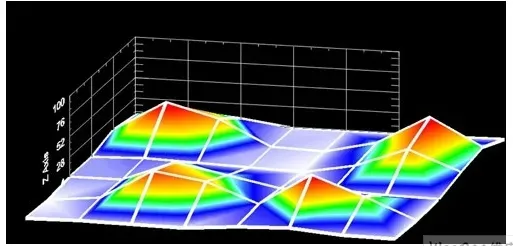
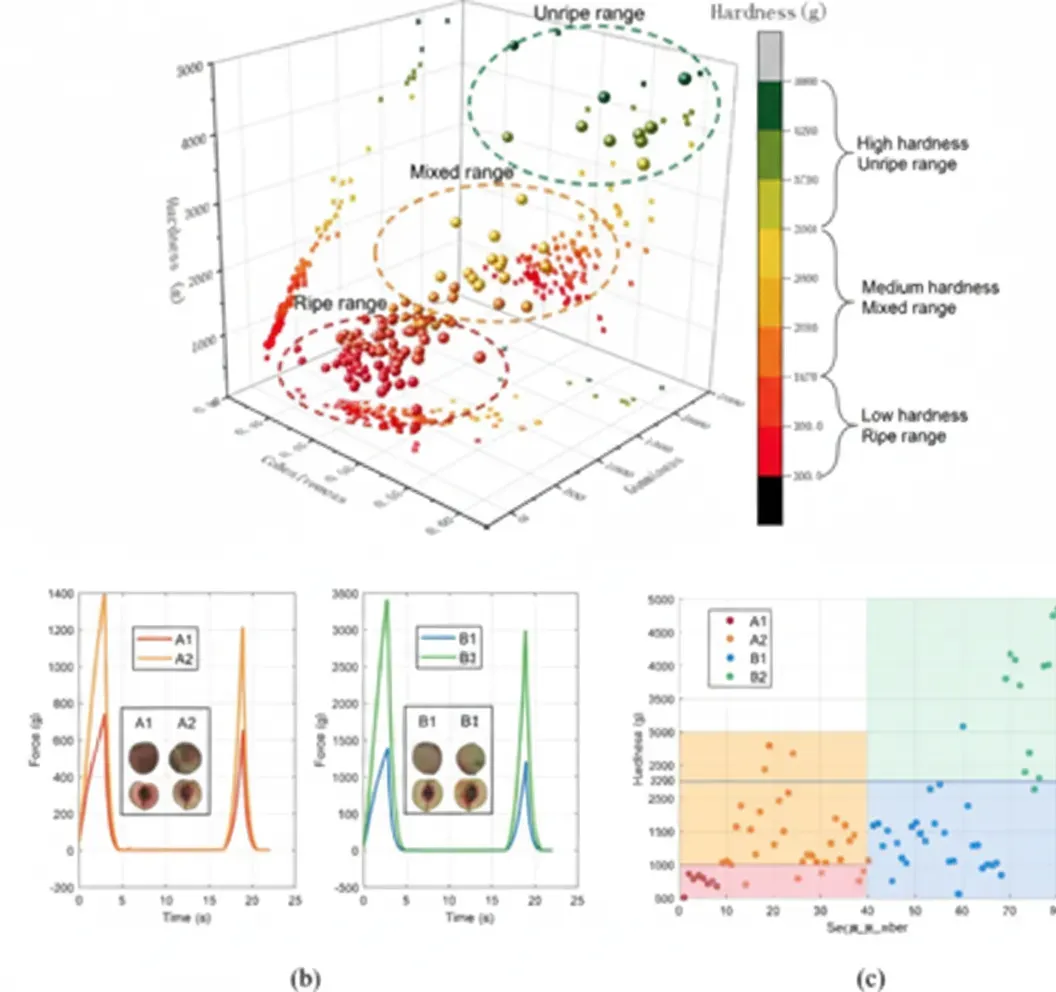
Figure 4 presents validation results obtained with a texture analyzer. Each peach sample underwent a TPA test on the texture analyzer to record force-time data and derive texture properties for each maturity category. These data demonstrate relationships among internal texture, color, and surface firmness, supporting the combined use of YOLOv4 and flexible piezoelectric sensing for maturity determination.
Discussion
The study includes a comparative analysis of hardware cost, power consumption, and sorting efficiency. Results indicate the proposed peach maturity grading and sorting system can automate grading accurately and stably while reducing labor. The combined appearance and firmness assessment method may be extended to other fruits with similar characteristics, offering potential for broader application in automated fruit sorting.