Introduction to Time-of-Flight (ToF) Sensors
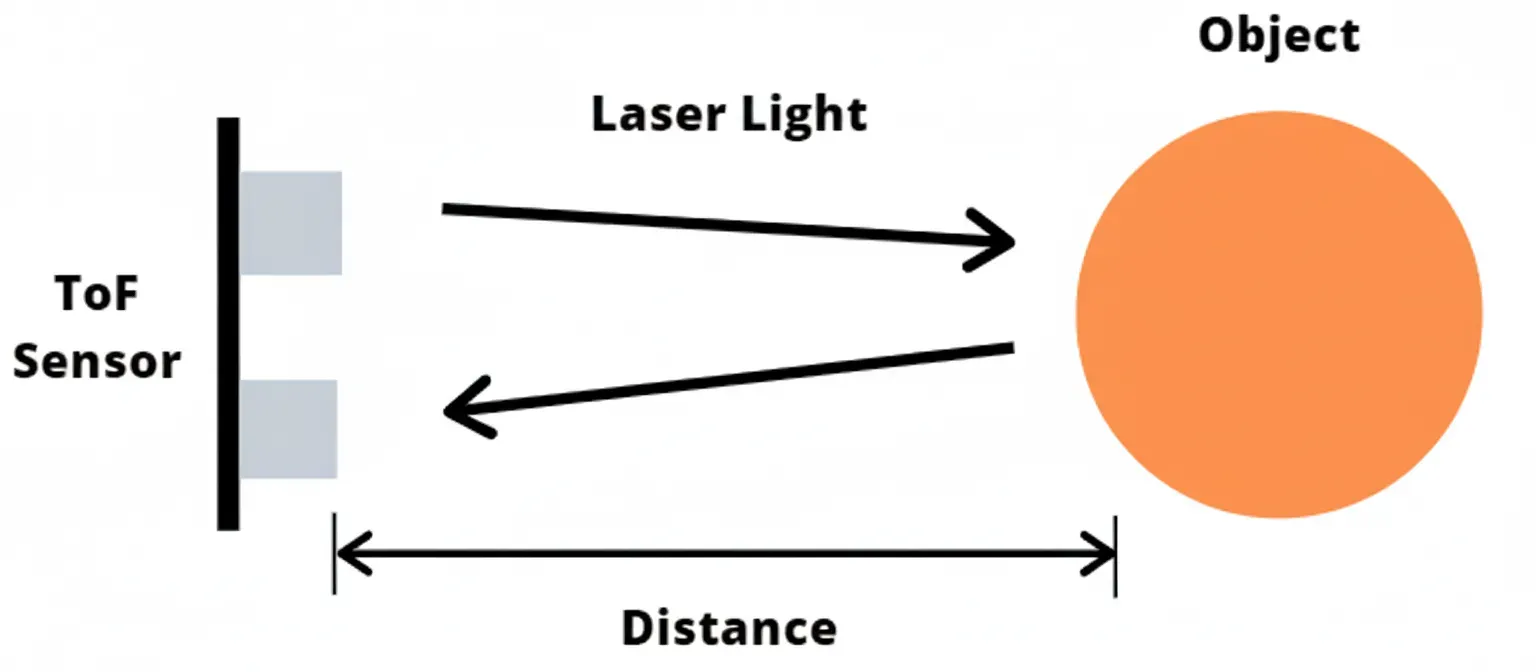
Time-of-Flight (ToF) sensors measure distance by calculating the time a light pulse (typically infrared or laser) takes to travel to a target and reflect back to the receiver. This ranging technique provides direct depth information, enabling 3D imaging when combined with camera systems. ToF technology is widely adopted in smartphones, robotics, automotive, industrial automation, and augmented reality applications.
Core Working Principle
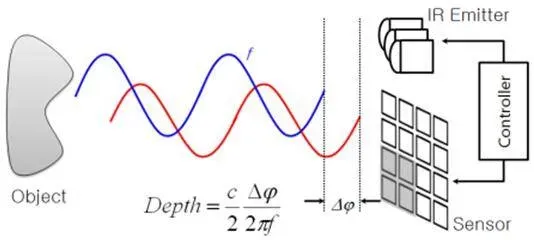
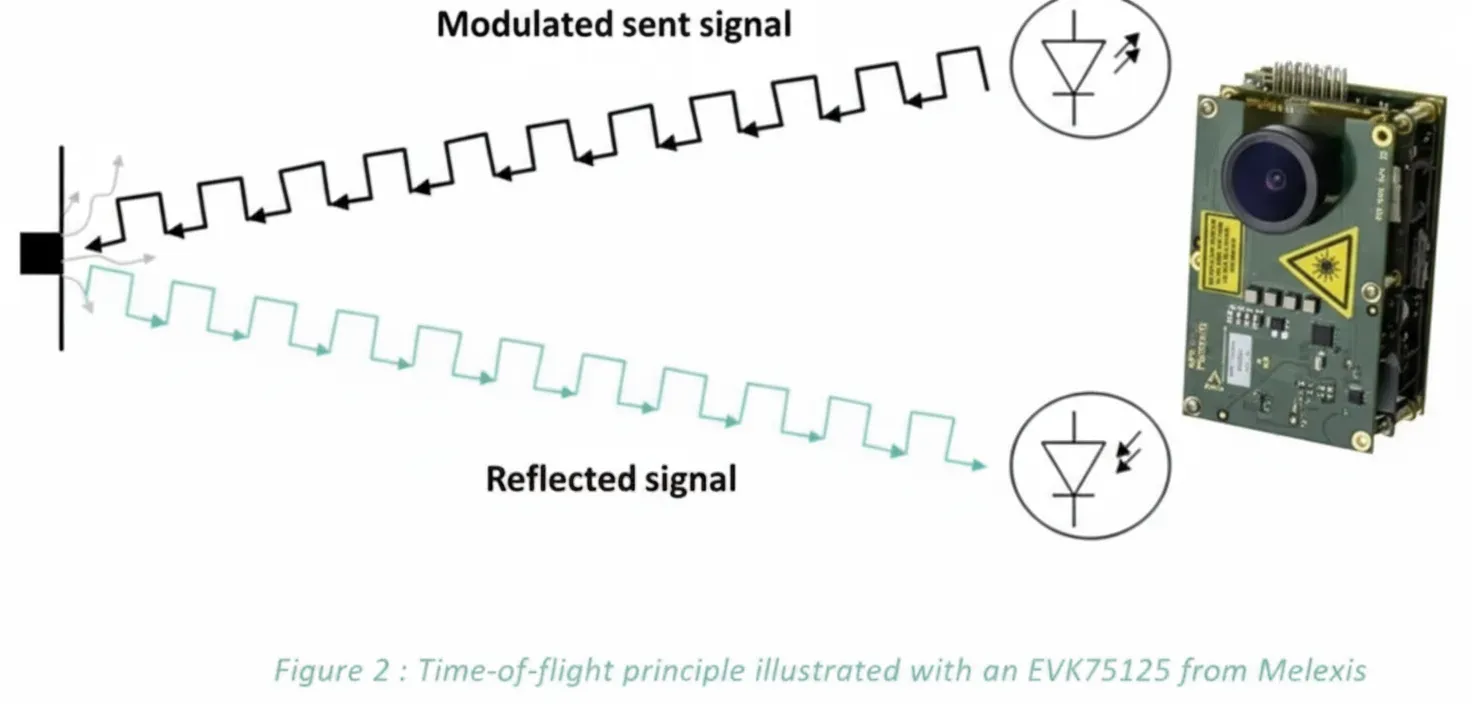
A ToF sensor emits modulated light pulses from an emitter. The light reflects off objects and returns to a photosensitive array (similar to a camera sensor). Distance is computed using the formula: d = (c * t) / 2, where c is the speed of light and t is the round-trip flight time. Many implementations use phase-shift measurement on continuous wave modulation for improved precision and range. Sensor arrays capture depth across a field of view, generating point clouds or depth maps. Modern ToF chips often integrate light source control, high-speed readout, and interfaces such as MIPI CSI-2 for easy camera module integration.
Advantages of ToF Sensors
- High Speed and Accuracy: Fast measurements with good precision across various distances.
- Environmental Robustness: Relatively insensitive to humidity, air pressure, and moderate temperature variations, supporting indoor and outdoor use.
- Long Range Flexibility: Effective for objects of different shapes and sizes at near and far distances.
- Eye Safety: Many systems use low-power modulated infrared lasers compliant with Class 1 standards.
- Cost Efficiency: Generally lower system cost and simpler architecture compared to structured light or mechanical scanning LiDAR.
These benefits make ToF sensors attractive for real-time 3D mapping, obstacle detection, gesture recognition, and SLAM algorithms.
Limitations and Challenges
- Scattering and Multiple Reflections: Bright nearby surfaces or corner geometries can cause artifacts and measurement errors.
- Ambient Light Interference: Strong sunlight can saturate pixels, reducing performance outdoors.
- Resolution Constraints: Current consumer-grade sensors often max out around VGA resolution, though higher resolutions are emerging.
- Range and Accuracy Trade-offs: Performance can degrade with highly reflective or absorptive materials.
Designers must account for these factors through calibration, multi-frame processing, and environmental compensation algorithms.
ToF Sensor Chips and System Integration
Leading manufacturers include Sony, Infineon, STMicroelectronics, and others. Automotive-grade examples like the Melexis MLX75027 offer VGA resolution, support for multiple wavelengths (850/940 nm), high frame rates, and integrated temperature sensing. These chips typically feature I2C control and MIPI output, resembling conventional image sensors in structure.
PCB and Electronics Design Considerations
Reliable ToF systems require careful integration:
- High-Speed Interfaces: Controlled impedance routing for MIPI CSI-2 and clock signals on multilayer PCBs.
- Power Management: Stable, low-noise supplies for emitters and sensitive receiver arrays.
- Thermal Management: Management of heat from light sources and processing chips, especially in compact modules.
- Rigid-Flex Solutions: Enable compact camera assemblies with flexible interconnects.
- Signal Integrity: Shielding, grounding, and layout practices to minimize crosstalk and EMI in mixed-signal environments.
Advanced PCB fabrication supports the miniaturization and performance demands of modern ToF modules in smartphones, drones, and autonomous vehicles.
Applications and Future Outlook
ToF sensors drive innovation in face authentication, automotive LiDAR alternatives, robotic navigation, AR/VR, and industrial inspection. Hybrid approaches combining ToF with other sensing modalities continue to expand capabilities. As manufacturing matures and resolution improves, ToF technology will play an increasingly central role in 3D perception systems, supported by sophisticated electronics platforms that ensure reliability and scalability.
FAQ
Q1: How does ToF differ from structured light or stereo vision?
A1: ToF provides direct depth measurement via time/phase, offering simpler systems and better performance in varying lighting compared to structured light (pattern projection) or stereo (triangulation).
Q2: What are common challenges when integrating ToF sensors?
A2: Managing ambient light interference, multiple reflections, thermal effects, and ensuring high-speed data interfaces on the PCB.
Q3: Why are flexible circuits useful in ToF camera modules?
A3: They allow compact, foldable assemblies in smartphones and wearables while maintaining signal integrity between sensor, processor, and optics.