Abstract
This article reviews recent advances in multi-sensor multi-target tracking based on the random finite set approach. Fusion methods that play a fundamental role in multi-sensor filtering are classified into data-level multi-target measurement fusion and estimation-level multi-target density fusion, which respectively share local measurements and posterior densities among the fused sensors. The important properties of each fusion rule are analyzed, including optimality and suboptimality. Two robust multi-target density averaging methods for different random finite sets are presented: arithmetic average fusion and geometric average fusion. The article concludes by highlighting related research topics and remaining challenges.
Fusion Methods in Multi-Sensor Filtering
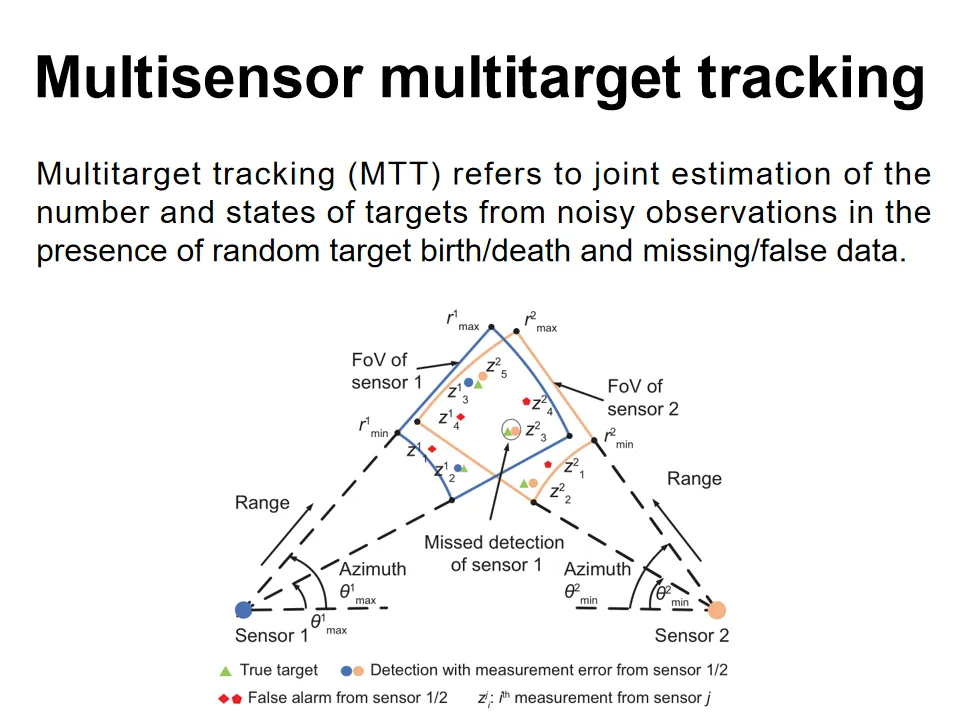
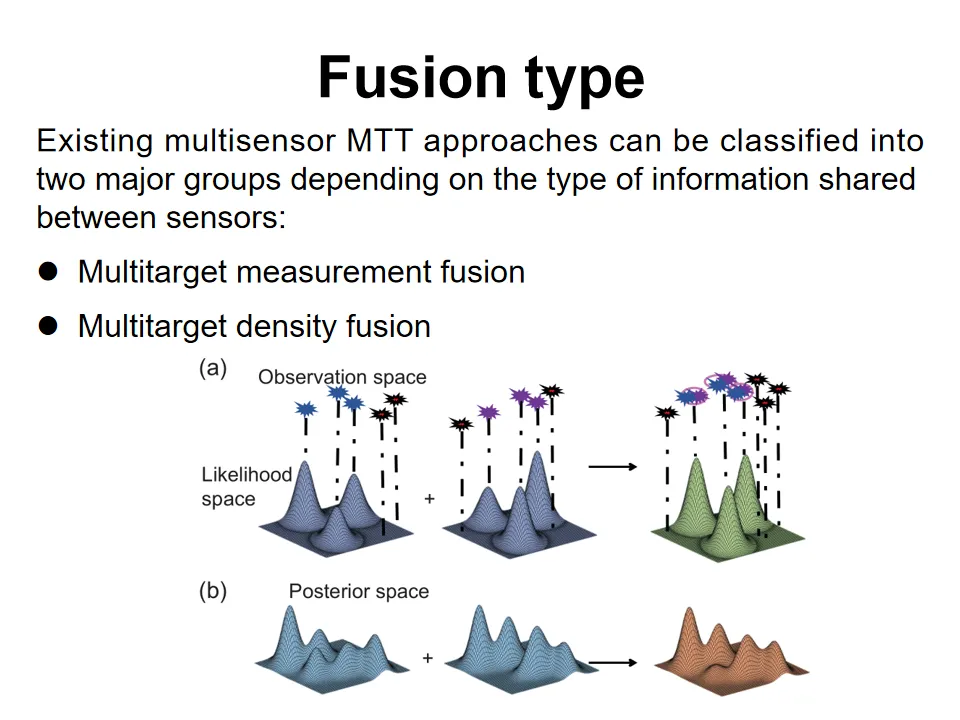
Fusion methods form the foundation of multi-sensor filtering. Data-level fusion combines multi-target measurements from different sensors, while estimation-level fusion merges multi-target posterior densities. These two approaches differ in the type of information exchanged and in how they manage uncertainty and correlations among sensor estimates. Key properties of fusion rules, such as optimality conditions and sources of suboptimality, are examined to guide method selection.
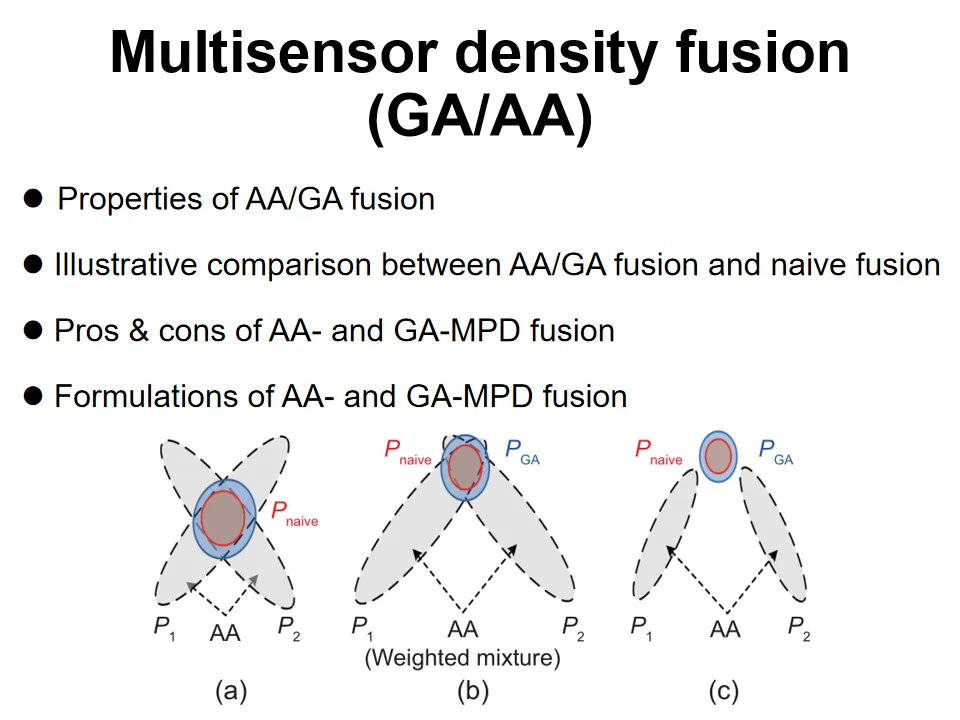
Density Averaging: Arithmetic and Geometric Approaches
For robust fusion of multi-target densities under different random finite set models, two averaging approaches are commonly used. Arithmetic average fusion provides a straightforward weighted average of densities. Geometric average fusion, often implemented via logarithmic pooling, preserves certain information-theoretic properties and can be more robust to overconfident local estimates. The choice between these methods depends on model assumptions and desired robustness to sensor discrepancies.
Research Topics and Challenges
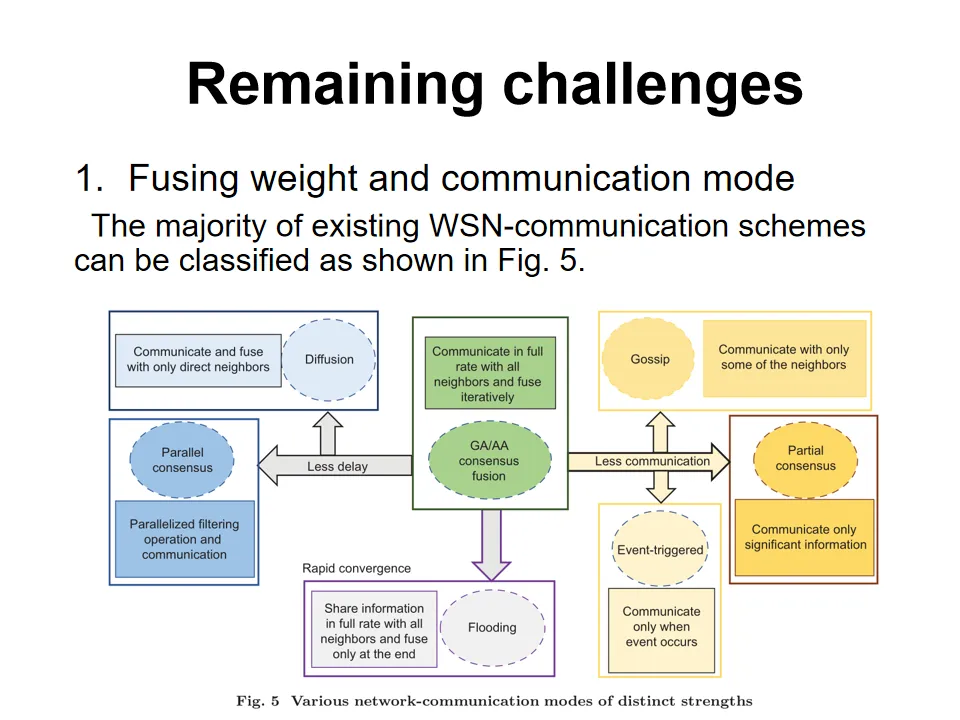
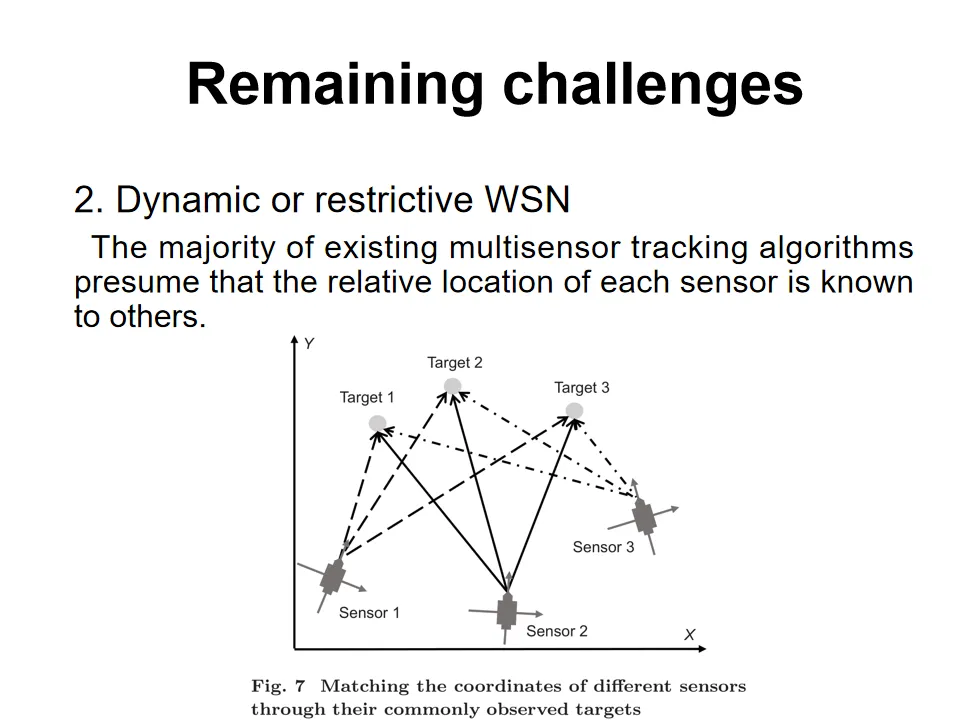
Ongoing research addresses issues such as handling dependent sensor information, scalable implementations for large sensor networks, and robust fusion under model mismatch or communication constraints. Further work is needed to develop practical algorithms that balance estimation accuracy, computational cost, and resiliency to inconsistent local estimates.