Advanced tactile sensing systems that mimic human skin are transforming robotics, prosthetics, and human-machine interfaces by enabling simultaneous detection of pressure, shear forces, temperature, and multimodal contact information. Technologies such as asymmetric capacitive microhair arrays, vision-based optical demodulation, and fiber-optic Bragg grating sensors deliver high sensitivity and multi-parameter discrimination. Realizing these capabilities in practical devices requires sophisticated printed circuit boards (PCBs) that handle precise analog signal conditioning, high-speed data acquisition, mixed-signal processing, and reliable integration with flexible or rigid-flex substrates.
Capacitive Tactile Sensors with Asymmetric Microhair Structures
Skin-inspired capacitive sensors employ tilted microhair arrays fabricated via two-photon polymerization as the dielectric layer. The asymmetric geometry produces distinct deformation patterns under normal pressure and directional shear, allowing the sensor to distinguish both magnitude and direction of forces.
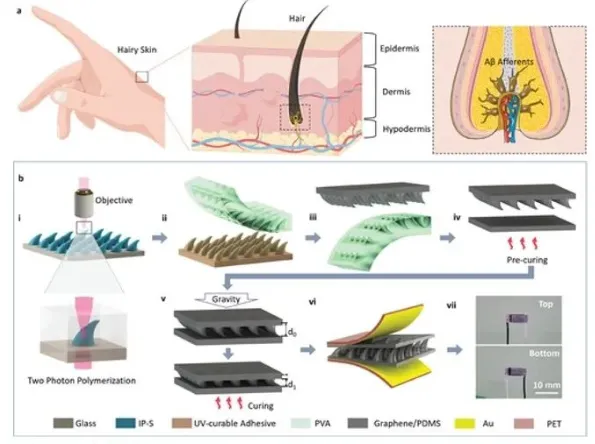
On the PCB side, these sensors demand high-resolution capacitive readout circuits with low-noise charge amplifiers, precise excitation signals, and synchronized multi-channel acquisition. Designers must implement controlled-impedance routing and guard traces to minimize parasitic capacitance and crosstalk. Flexible or rigid-flex PCBs with polyimide substrates accommodate the mechanical compliance needed for e-skin integration on robotic fingers or prosthetic limbs. Thermal stability of the dielectric materials and consistent copper thickness ensure repeatable capacitance changes across operating temperatures.
Vision-Based Multimodal Tactile Sensing and High-Speed Imaging PCBs
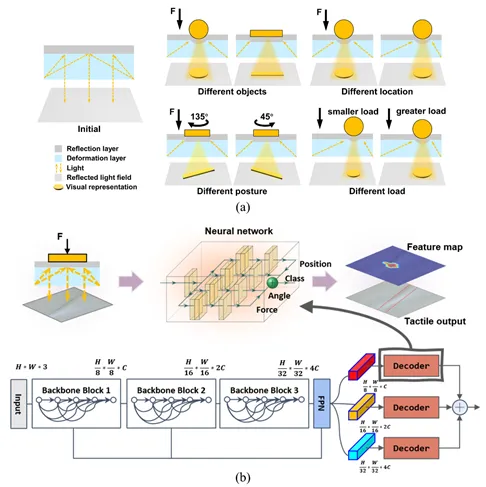
Vision-based systems convert tactile information into high-resolution optical images captured by integrated cameras, then use deep neural networks to decouple multiple modalities such as force magnitude, orientation, and object properties. This approach achieves micron-level spatial resolution and low error rates in force and angle estimation without dedicated hardware decoupling for each stimulus.
The supporting electronics require PCBs optimized for high-speed image sensor interfaces (MIPI CSI-2 or similar), real-time AI inference accelerators, and low-latency data paths. Stack-up design must support controlled impedance for high-frequency digital lines while providing robust power delivery to image sensors and processors. Mixed-signal partitioning isolates sensitive analog front-ends from digital switching noise. Thermal management around high-performance SoCs prevents image drift, and HDI features enable compact modules suitable for integration into robotic grippers or wearable devices.
Fiber-Optic Bionic Tactile Sensors for Simultaneous Temperature and Pressure Detection
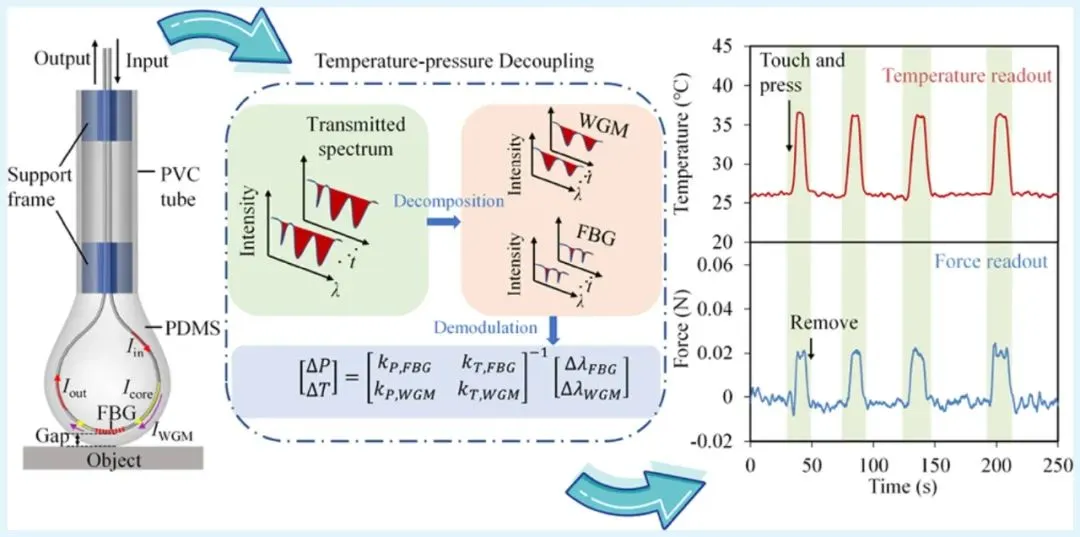
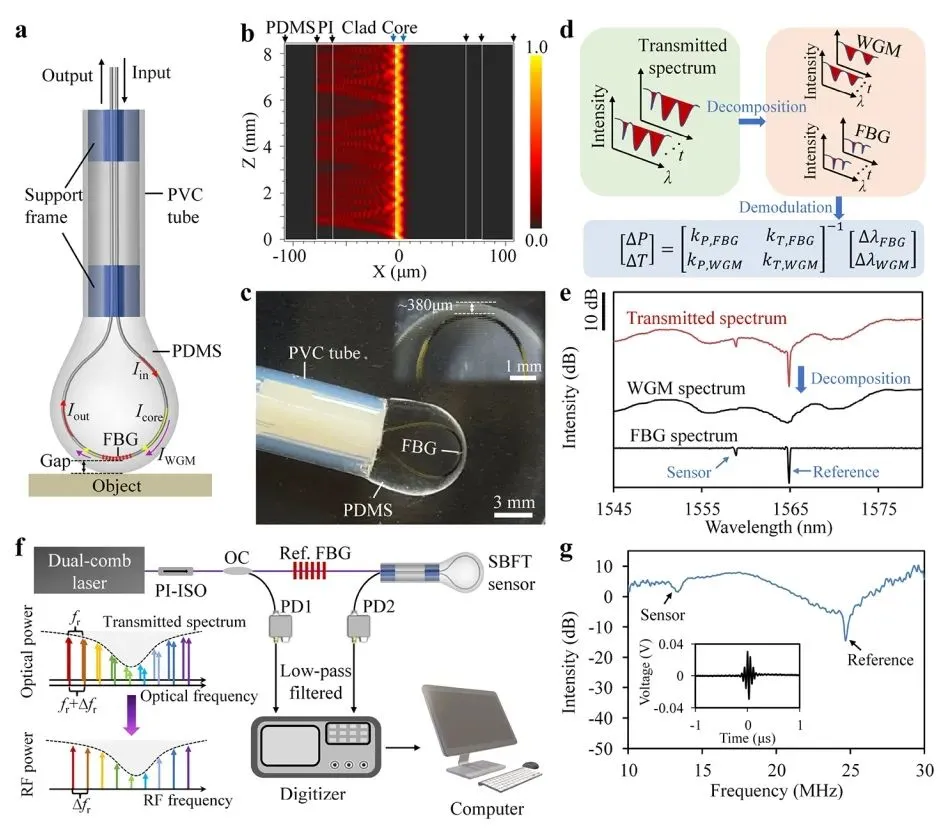
Flexible fiber-optic sensors using bent fiber Bragg gratings (FBG) encapsulated in PDMS exploit differential sensitivities of FBG and whispering gallery modes to temperature and pressure. A single-cavity dual-comb fiber laser simplifies spectral demodulation while maintaining high resolution and low cost.
Interrogation electronics on the PCB must support precise wavelength tracking with high-resolution spectrometers or frequency-to-voltage converters, low-noise photodetection, and stable laser drivers. Low-Dk/Df laminates and careful via design preserve signal integrity in the high-frequency domain. PDMS encapsulation introduces thermal and mechanical considerations that influence PCB material selection—high-Tg laminates and robust grounding schemes mitigate drift and EMI in biomedical or industrial environments. Rigid-flex constructions facilitate integration with soft robotic skins while maintaining reliable electrical connections.
PCB Material Selection, Layout, and Manufacturing Considerations
All three sensor families share common PCB requirements for reliable performance:
- Materials: High-Tg or low-loss dielectrics for thermal stability; polyimide or liquid-crystal polymer for flexible sections; appropriate copper weights for power integrity.
- Layout: Mixed-signal isolation, controlled impedance, thermal vias, and via-in-pad techniques for dense interconnects.
- Manufacturing: HDI capabilities, sequential lamination, and DFM reviews to support fine features required by high-density sensor arrays and compact interrogation modules.
Reliability challenges include electromigration in power traces, delamination under repeated flexing, and corrosion in harsh operating conditions. Early DFM collaboration ensures designs meet both electrical performance and mechanical durability targets.
Industry Applications and Integration Challenges
These tactile sensing technologies find use in dexterous robotic hands, prosthetic limbs, soft-tissue palpation devices, and collaborative robots. In each case, the PCB must balance high sensitivity, low power consumption, EMI immunity, and mechanical compliance while supporting real-time data processing and wireless communication.
Future Trends in PCB Design for Advanced Tactile Sensing Systems
Next-generation skin-like sensors will drive further PCB innovation. Higher sensor density and multi-modal fusion will require advanced 3D heterogeneous integration, embedded components, and finer-pitch interconnects. AI accelerators integrated directly on flexible PCBs will enable on-device inference with minimal latency. Co-packaged optics and photonic-electronic integration will demand hybrid PCBs supporting both electrical and optical pathways. Sustainable materials, including halogen-free laminates and recyclable substrates, will gain importance as production volumes increase. Real-time health monitoring of the PCB itself—through embedded sensors for temperature, strain, and interconnect integrity—will enhance system reliability in safety-critical applications.
Conclusion
Skin-inspired capacitive, vision-based, and fiber-optic tactile sensors represent a major advance in artificial touch, but their performance ultimately depends on the quality of the underlying PCBs. Precise stack-up design, signal integrity optimization, thermal management, and robust manufacturing processes transform research prototypes into reliable, high-volume products.
Aivon provides the advanced PCB fabrication and engineering expertise required to support these demanding applications, enabling seamless integration of complex tactile sensing electronics into next-generation robotics, prosthetics, and biomedical devices.