Inertial measurement units (IMUs) that use accelerometers and gyroscopes help reduce safety risks for autonomous vehicles.
Overview
Autonomous driving is a major trend in the automotive industry. Advanced positioning and sensing technologies are helping vehicles operate more safely and accurately. While there is ongoing debate about when fully autonomous vehicles will become widespread, many vehicles today are equipped with advanced driver assistance systems (ADAS) such as lane departure warning, parking assist, and automatic emergency braking. These systems are generally classified as SAE Level 1 (driver assistance) or Level 2 (partial driving automation), which still require the driver's full involvement.
The key question is when technology will reach SAE Level 5, full autonomy without driver intervention. One of the main hurdles is ensuring safety. To achieve full autonomy, vehicles must be able to operate safely and accurately under any weather or road condition and avoid causing significant harm to passengers, pedestrians, or property.
This requires built-in guidance and navigation capabilities so the vehicle can continue to operate safely if perception sensors such as lidar, radar, or cameras fail, or if GNSS satellite signals are intermittently disrupted by weather, terrain, or the surrounding environment.
01 Safe-stop sensing for autonomous driving
One critical sensing technology is the inertial measurement unit (IMU). Because IMUs rely on gravity and physical laws rather than external conditions, they can continue to provide data even when perception sensors fail due to weather. That data allows the vehicle to maintain safe control until it can perform a safe stop or other navigation systems resume operation.
By reducing data gaps and improving operational safety, IMUs play a role in advancing the development of fully autonomous driving. Without the safety buffer provided by IMU sensors, autonomous vehicles would struggle to operate reliably on urban streets and highways.
02 What is an IMU sensor and how does it work?
Most IMUs combine two types of sensors: accelerometers and gyroscopes. Accelerometers measure linear acceleration along three orthogonal axes. Integrating acceleration yields velocity, and integrating velocity over time yields position.
Gyroscopes measure angular rate about three orthogonal axes. Integrating angular rate over time yields changes in roll, pitch, and yaw, which correspond to changes in an object's attitude.
An IMU module with both gyro and accelerometer sensors can provide measurements for six degrees of freedom (commonly referred to as 6-DOF) or more.
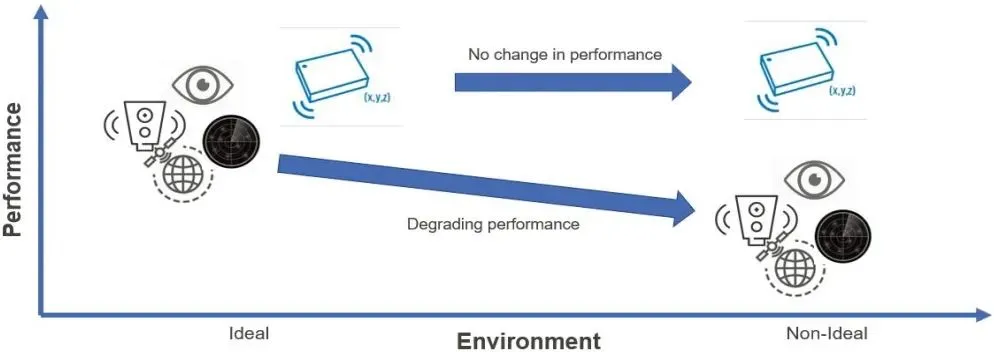
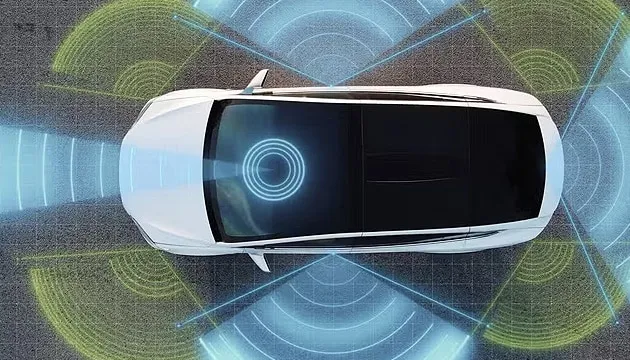
Figure 1: IMU sensors rely on gravity and motion physics. Unlike vision, radar, lidar, and other perception sensors or navigation systems that depend on GNSS signals, IMU-based guidance systems are less affected by adverse environmental conditions or physical obstructions such as tunnels or foliage, and can continue operating.
03 Why do some IMUs include a magnetometer?
Accelerometers can be used to compute roll and pitch relative to Earth's gravity and to correct gyroscope drift, but they cannot determine absolute heading (yaw) because yaw changes are orthogonal to the gravity vector. A magnetometer measures magnetic field strength in three dimensions. By referencing the Earth's magnetic field, it can help determine heading (yaw) as well as contribute to roll and pitch estimation.
Integrating a magnetometer into an IMU helps determine an object's initial heading and correct integrated yaw errors from the gyroscope during sensor-fusion algorithms.
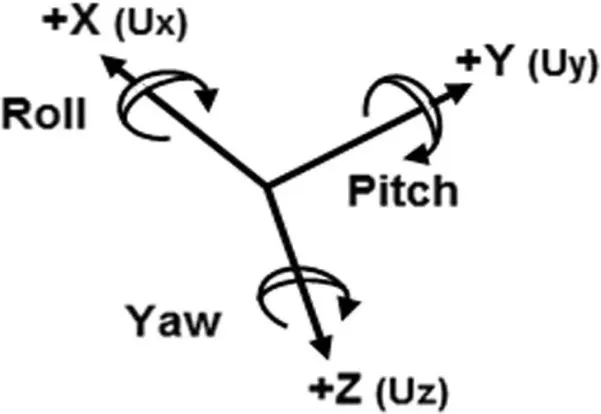
Figure 2: An IMU uses accelerometers and gyroscopes to capture measurements for six degrees of freedom: three translational axes (forward/backward, left/right, up/down) and three rotational axes (roll, pitch, yaw).
04 IMU performance metrics and triple redundancy
Bias instability is one of the most critical performance parameters for gyroscopes. It measures how much the gyro bias drifts over time. The gyroscope's rate output, when integrated, yields angular changes (roll, pitch, yaw), so any drift-related error produces cumulative angular error.
Over time, those angular errors translate into position errors. For automotive applications, high-performance IMUs are a necessary component for achieving high-precision vehicle positioning.
In a triple-redundant IMU architecture, three IMUs are used to provide additional reliability and accuracy. If one or more sensors fail to operate correctly for any reason, the system can be programmed to identify faulty sensor data and exclude or deweight it. Faulty sensor outputs or erroneous datasets are ignored or deprioritized. This architecture improves the system's reliability while maintaining performance.
IMU sensors may not attract as much attention as lidar or cameras, but in many ways they are a key safety sensor component required for successful operation of SAE Level 4 and Level 5 autonomous vehicles over the next decade.