Overview
Human-machine interaction is widely used in robotics control and augmented/virtual reality. Current interaction methods are often single-mode, require bulky wearable devices or physical contact with the interface, and thus limit interaction efficiency and intelligence. Researchers led by PhD student Liu Weijie at Zhejiang University Mechanical 306 Laboratory proposed a flexible dual-mode capacitive sensor that senses both non-contact distance and contact pressure. The sensor was applied to a human-machine interface to enable touchless and tactile interaction. The results were published in Advanced Materials Technologies under the title "A Flexible Dual-Mode Capacitive Sensor for Highly Sensitive Touchless and Tactile Sensing in Human-Machine Interactions". The work received funding from national science programs and university research funds.
Sensor structure
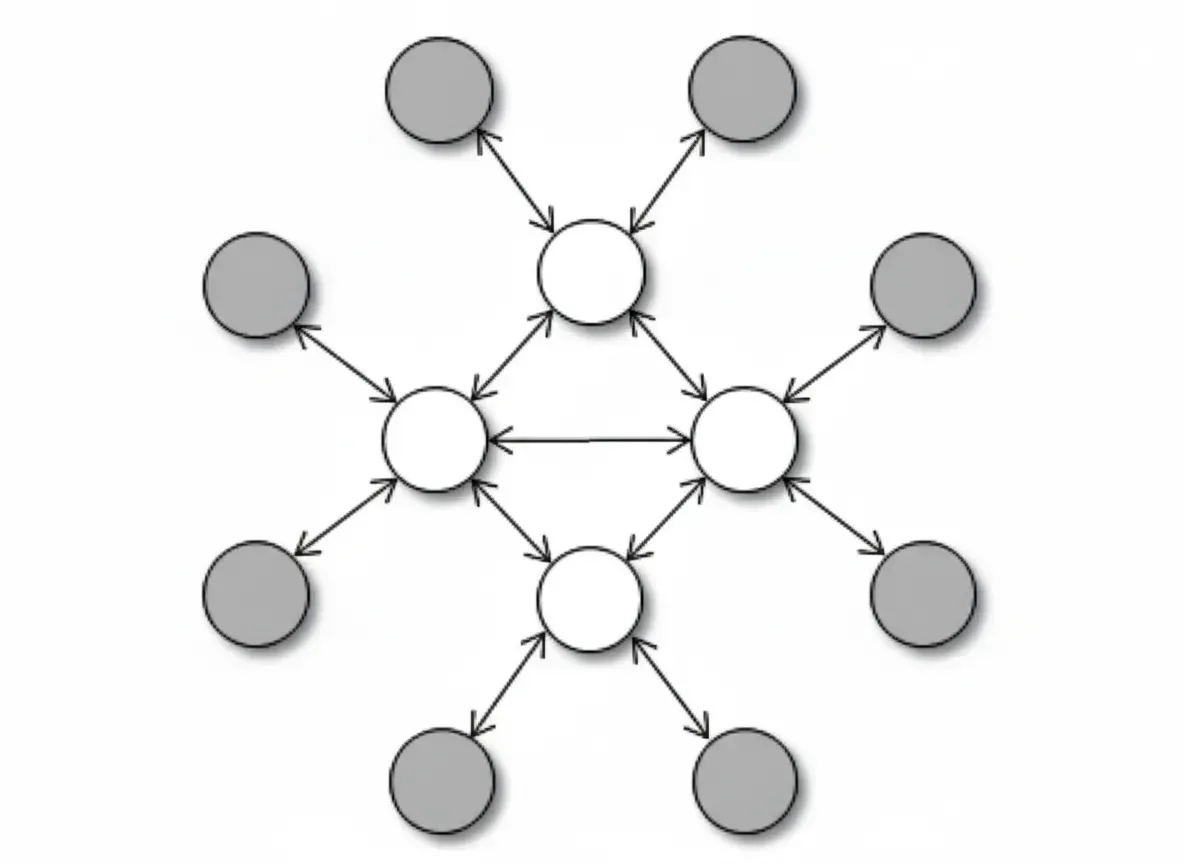
The sensor structure is shown in Figure 1. It consists of three layers: top and bottom PET substrates with maze-pattern copper electrodes, and a silicone rubber dielectric layer sandwiched between them. The dielectric has a porous–truncated-pyramid bilayer microstructure. The sensor array comprises 12 sensing units; each unit contains a pair of complementary maze electrodes and a layered porous–truncated-pyramid dielectric. The square maze electrode geometry strengthens the fringe field at electrode edges to improve near-field sensing. The porous–truncated-pyramid layered dielectric is designed to improve silicone deformation through staged deformation, thereby enhancing high-pressure sensing performance.
Operating principle
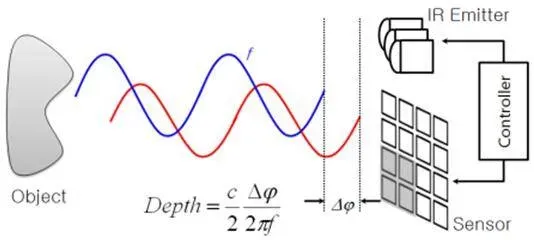
The touchless sensing principle is as follows: the top and bottom electrodes form a capacitor. When an external object has not yet contacted the sensor, the sensor detects the approach via fringe fields excited by the electrodes. As the object approaches, the fringe field weakens. For conductive objects, this weakening is mainly due to induced charges from electrostatic induction; for insulating objects, weakening is mainly due to dielectric polarization.
The pressure sensing principle is as follows: when an object applies pressure to the sensor, the dielectric deforms and the internal electric field distribution changes. In the low-pressure range, due to the low effective Young's modulus, the porous layer deforms readily. Internal pores are compressed, reducing the distance between top and bottom electrodes; at the same time, the effective dielectric constant of the dielectric increases as trapped air is compressed. Both effects increase the sensor capacitance. Because the porous structure disperses stress, deformation of the truncated-pyramid layer is minimal in this stage, so the capacitance change is dominated by deformation of the porous layer. In the high-pressure range, the internal pores are fully compressed and the porous layer behaves like a downward solid, further compressing the truncated-pyramid structures. Deformation of the truncated pyramids shortens the electrode separation and causes further capacitance increase.
Performance
The proposed dual-mode sensor demonstrates high sensing capability. Touchless distance detection for a human hand reaches up to 110 mm. The sensor can distinguish objects approaching at different speeds and exhibits stable signal output. The pressure detection range is 0 to 200 kPa, with two linear sensitivity regions and a peak sensitivity of 0.464% kPa^-1. The sensor can effectively distinguish near-range signals from tactile signals, and shows good signal stability, repeatability, and reliable gesture recognition.
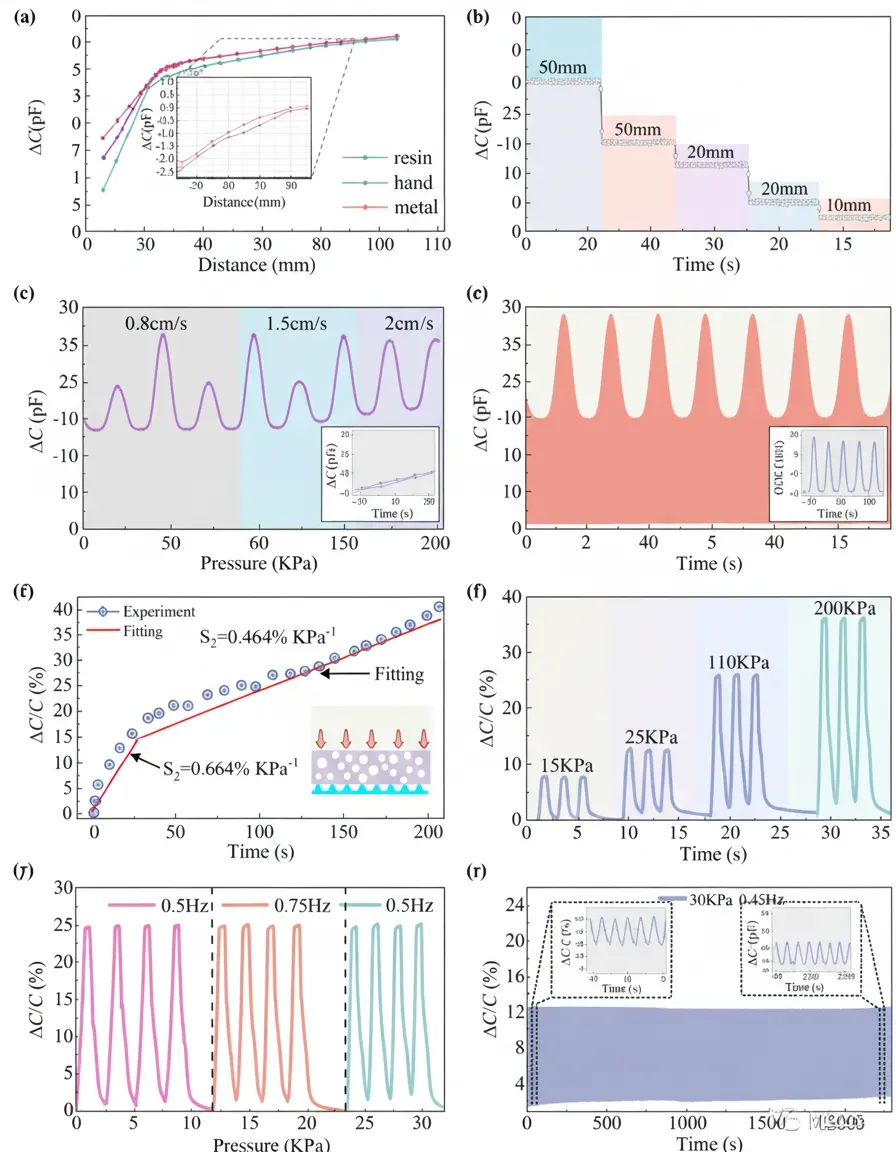
Figure 1. Performance test results of the flexible dual-mode capacitive sensor.
Human-machine interaction demonstration
To validate the sensor in human-machine interaction, a robotic interaction experiment platform was built. The sensor connects to the acquisition circuit via an FPC. An MCU controls analog switches to select sensor units. The selected row and column electrodes are connected to an AD7153 capacitance-to-digital converter (CDC) chip, which acquires capacitance data by continuously sampling the charge through the sensor during square-wave excitation. Data are transmitted via USB to the computer that controls the robotic arm; the computer recognizes interaction actions from the collected data and sends control commands to the robot and gripper via RS232.
In the experiment shown in Figure 5, a finger passed above sensor units 1, 4, 8, and 11 in sequence, producing the following time-domain sequence: unit 1 decreased by 0.38 pF, unit 4 decreased by 0.31 pF, unit 8 decreased by 0.39 pF, and unit 11 decreased by 0.45 pF. The robotic arm received a real-time command to rotate counterclockwise about the Y axis and executed the operation. In addition to touchless interaction, the sensor supports tactile interaction. When the finger contacts different sensor units sequentially, the system can command the gripper to grasp and release and the robotic arm to move along the Z axis. The sensor can perceive continuous sequences of actions and switch seamlessly between touchless and tactile interaction modes.
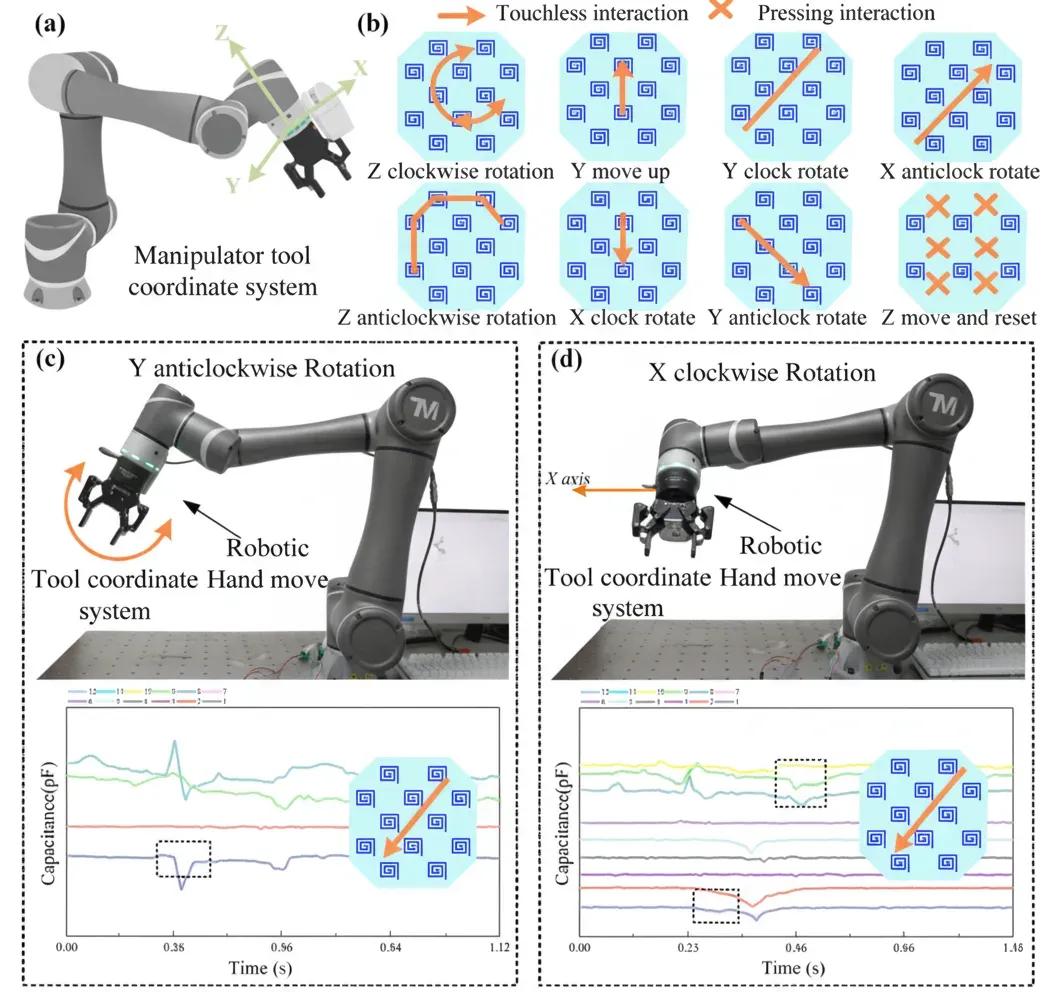
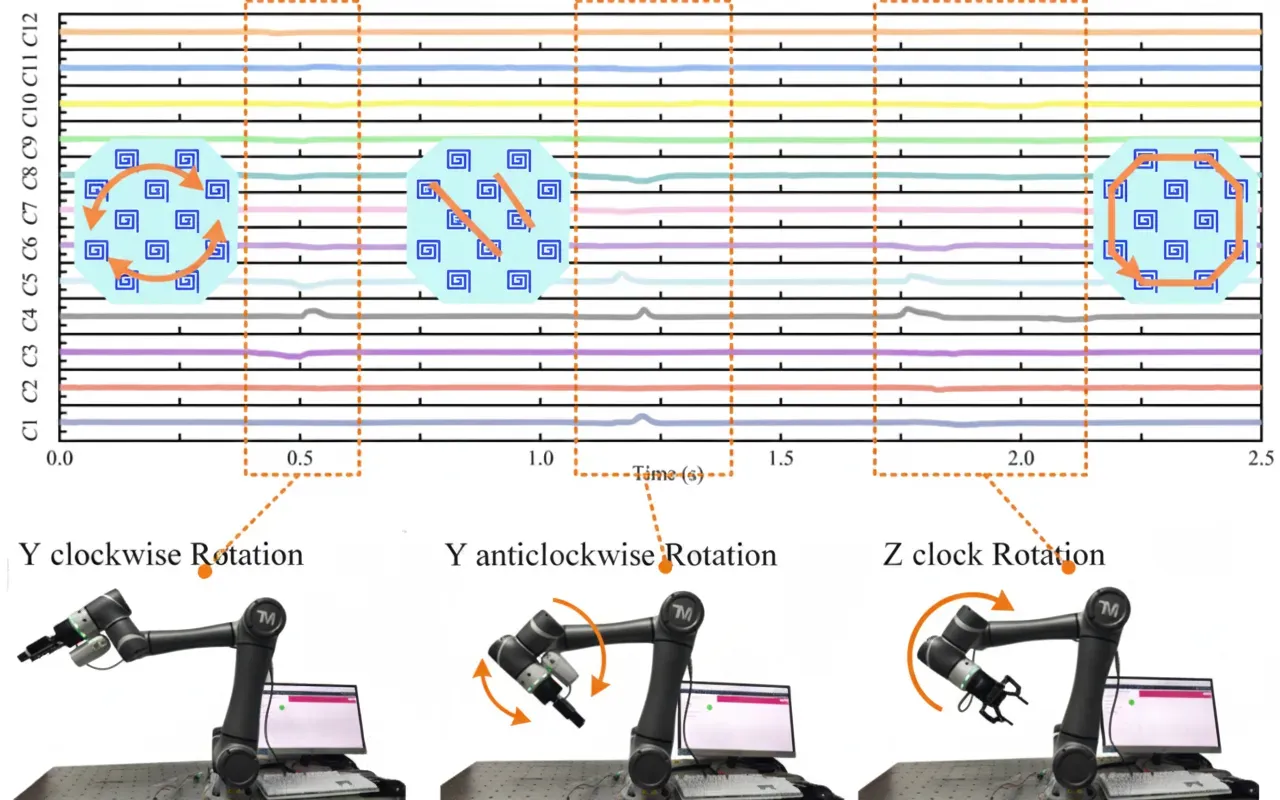
Figure 2. Illustration of touchless and tactile dual-mode human-machine interaction.
Conclusion
The sensor's demonstrated capabilities indicate potential for future human-machine interface applications. Accurate and seamless detection of touchless and tactile inputs can improve control fidelity and intuitive interaction. Integrating this type of dual-mode capacitive sensor into interaction systems may enable new interaction scenarios in robotics and interactive devices.