Overview
Multipoint 3-axis tactile pressure sensing implemented with high-resolution, high-sensitivity optical systems provides rich information about surface pressure distribution and plays an important role in various human-machine interaction and robotics applications. However, optical systems are often bulky, which complicates sensor mounting and system integration.
According to MEMS Consulting, researchers at the University of Tokyo recently demonstrated a flexible thin-film multipoint 3-axis pressure sensor based on optical methods. The sensor detects 3 cm x 4 cm area 3-axis pressure distributions, with normal and shear pressure detection up to 360 kPa and 100 kPa respectively. Porous rubber is used as the 3-axis pressure-sensitive optical modulator, eliminating the need for a heavy, rigid focusing system without sacrificing sensitivity. By integrating a thin, flexible backlight layer and imager, the total device thickness is 1.5 mm and the sensor remains functional when bent to an 18 mm radius. The work is published in Science Advances as "An optical-based multipoint 3-axis pressure sensor with a flexible thin-film form".
Design and Sensing Principle
The sensor structure consists of a top flexible backlight layer, a middle pressure-sensitive layer made of semi-transparent porous rubber, and a bottom flexible film imager. When pressure is applied, deformation of the porous rubber changes the gaps between rubber features and the locations of emitted light. By analyzing variations in the light spots formed on the imager, multipoint 3-axis pressure can be reconstructed. The sensing area is divided into a 6 x 8 array of sensing units, with each unit detecting a single-point 3-axis pressure, enabling identification of multipoint 3-axis pressure distribution across the region.
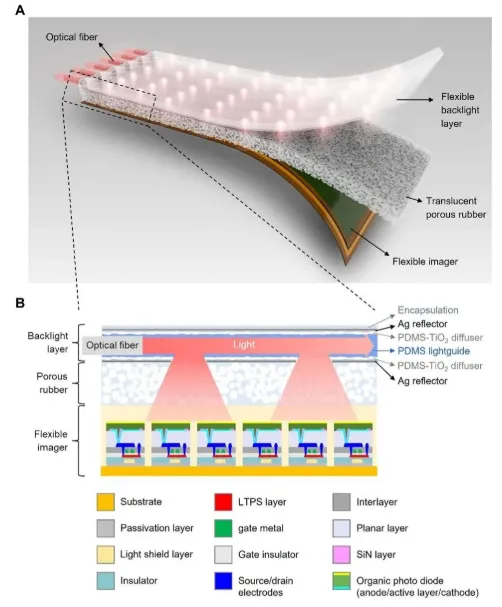
The optical multipoint 3-axis pressure sensor structure
Backlight Layer and Porous Rubber
To achieve overall thinness and flexibility, a thin backlight layer was fabricated to couple light into the sensor. The researchers made a thin, stretchable diffusion sheet by coating and peeling a composite of TiO2 particles and PDMS. The backlight layer supplies a point source array for each sensing unit to enable large-area multipoint 3-axis pressure sensing.
Porous rubber was produced by mixing granulated sugar into PDMS and dissolving the sugar after curing. Under compressive load, partial closing of internal pores increases rubber gaps and reduces light scattering. Thus, the porous rubber acts as a 3-axis pressure-sensitive optical transmission modulator. Using this semi-transparent porous PDMS medium, the thin-film sensor captures pronounced light distribution changes under applied pressure. Constructed from plastic films and rubber materials, the total sensor thickness is 1.5 mm, allowing it to flex and conform to curved surfaces such as armrests.
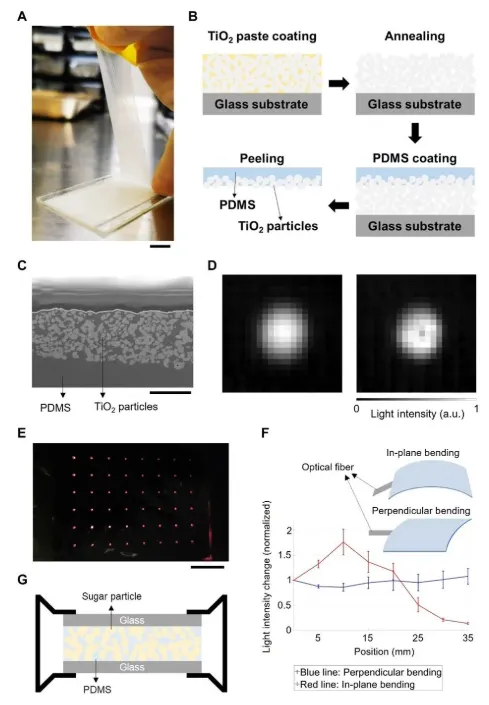
Backlight layer fabrication and porous rubber properties
Performance
The developed sensor achieves normal and shear pressure sensing up to 360 kPa and 100 kPa respectively. Each sensing unit shows consistent responses under normal and shear loads, and no degradation was observed in repeated tests, indicating good reproducibility and stability. This performance stems from the simple and reliable sensing mechanism: responses to normal and shear pressure derive from changes in the shape of light spots, independent of overall light intensity. The spot shape changes result from the direct deformation of high-elasticity, mechanically durable porous PDMS rubber.
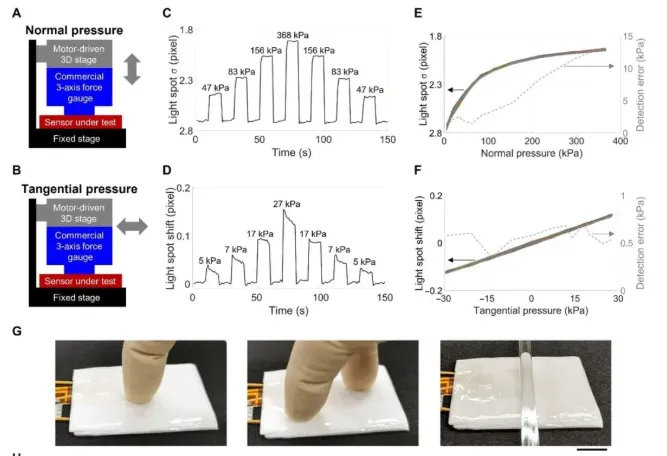
Sensor characteristics
Conclusion
The researchers developed a large-area flexible pressure sensor capable of detecting 3-axis pressure distributions across a 3 cm x 4 cm area using a 6 x 8 detection array. Constructed from plastic films and rubber, the thin-film form factor can be adhered to various curved surfaces. Accurate normal and shear pressure detection beyond 360 kPa and 100 kPa provides a wide dynamic range, suitable for diverse tactile interaction scenarios. The thin, flexible structure and 3-axis detection capability enable detailed pressure distribution mapping that can support advanced pressure tracking, grasp control, and slip detection in different application areas.