Introduction to Tactile Sensors
Tactile sensors, commonly known as touch sensors, detect physical contact, pressure, force, and related parameters such as shape and distribution. They play a vital role in human-machine interfaces, robotics, consumer electronics, and industrial automation by converting mechanical interaction into usable electrical signals.
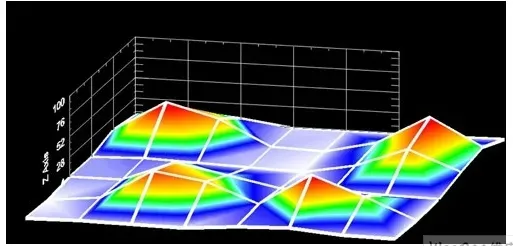
These sensors generate data that can be processed into virtual images or maps representing contact patterns, enabling advanced features like fingerprint recognition, haptic feedback, and precise grip control.
What Are Tactile Sensors and How Do They Work?
A tactile sensor responds to an object touching its surface by measuring changes in physical properties. Key information includes presence of contact, pressure distribution, object shape, and size. The core mechanism involves an array of sensing elements arranged in rows and columns. When contact occurs, local changes in capacitance, resistance, or light intensity are detected and processed by supporting circuitry to reconstruct a spatial map of the interaction.
This array-based approach, combined with signal conditioning and data processing electronics, allows the sensor to translate physical stimuli into digital representations suitable for microcontrollers or higher-level systems.
Structure of Tactile Sensors
Tactile sensors typically consist of:
- Sensing elements (capacitors, piezoresistors, or optical source-detector pairs).
- A flexible or rigid substrate supporting the array.
- Protective layers that transmit force while shielding internal components.
- Interface circuitry for scanning, amplification, and analog-to-digital conversion.
The modular array design supports scalability from small touch interfaces to large-area robotic skins.
Main Types of Tactile Sensors
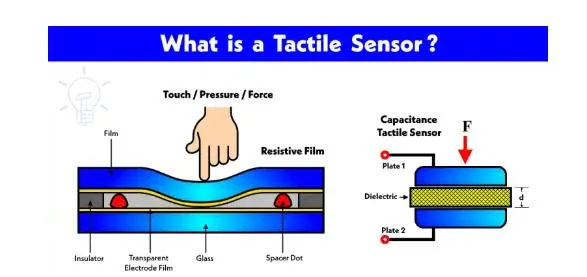
Capacitive Tactile Sensors
The most widespread type. They detect changes in capacitance caused by deformation altering the distance between plates. The capacitance C is calculated as epsilon_0 multiplied by epsilon_r multiplied by the area A divided by the distance d. Where pressure modifies d while other parameters remain relatively constant. Capacitive arrays offer good sensitivity for touchscreens and pressure mapping but may have moderate response times.
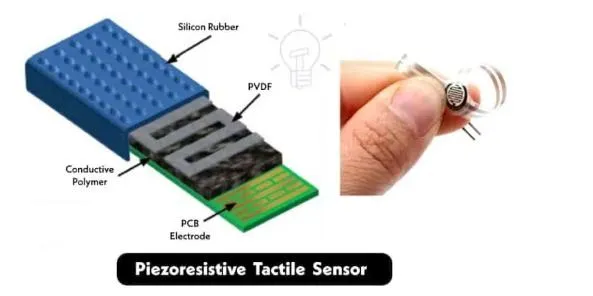
Piezoresistive Tactile Sensors
These measure force-induced resistance changes in conductive materials such as specialized rubbers or carbon-based composites. They generally provide higher sensitivity and lower hysteresis than capacitive types, making them suitable for dynamic force measurement and texture discrimination. Elements are arranged in a grid for spatial resolution.
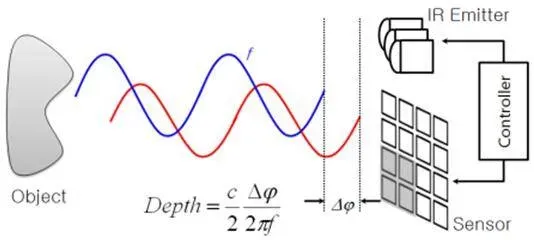
Optical Tactile Sensors
These rely on variations in light intensity caused by surface deformation interrupting or modulating paths between light sources and photodetectors. While resolution and sensitivity may be slightly lower, they can be cost-effective and robust for certain robotic and research applications.
Key Applications
Tactile sensors enable functionality across industries:
- Consumer Electronics: Touchscreens, fingerprint sensors, and haptic interfaces in smartphones and wearables.
- Robotics: Grippers, electronic skin for object manipulation, slip detection, and safe human-robot interaction.
- Medical Devices: Pressure mapping in prosthetics, surgical tools, and patient monitoring systems.
- Automotive: Seat occupancy, touch controls, and safety systems.
- Industrial and Security: Biometric access, force feedback, and automation.
Design and Manufacturing Considerations
Effective tactile sensor systems require careful engineering:
- Array Density and Resolution: Higher element counts improve spatial accuracy but increase signal processing complexity and PCB layer count.
- Material Selection: Flexible substrates and cover layers must balance sensitivity, durability, and environmental protection.
- Signal Integrity: Low-noise analog front-ends, multiplexing, and shielding are critical, especially in dense arrays.
- Power and Response: Optimization for low-power operation in portable devices versus high-speed requirements in robotics.
- Reliability: Resistance to repeated mechanical stress, temperature variation, and contamination.
PCB and FPC Integration for Tactile Sensors
Tactile sensors are closely coupled with their readout electronics. Flexible Printed Circuits (FPCs) are frequently used to accommodate bending in robotic skins or wearable applications, while rigid or rigid-flex boards handle high-speed processing and component integration.
Key manufacturing aspects include:
- Precise control of trace impedance and crosstalk in scanning circuits.
- Integration of ADCs, microcontrollers, and communication interfaces (I2C, SPI).
- Thermal management and mechanical support for sensor arrays.
- Advanced assembly techniques for hybrid constructions combining sensing layers with processing electronics.
Expertise in HDI, flexible circuit fabrication, and mixed-signal design ensures high yield, signal fidelity, and long-term reliability in production volumes.
Industry Trends
Ongoing developments focus on higher resolution, multimodal sensing (pressure + temperature + vibration), artificial skin for prosthetics and advanced robotics, and integration with AI for object recognition and adaptive control. Miniaturization through MEMS processes continues to expand possibilities in consumer and medical fields.
By leveraging sophisticated PCB platforms, engineers can transform tactile sensor arrays into robust, scalable solutions that enhance safety, precision, and user experience across diverse electronic systems.
FAQ
Q1: What is the main difference between capacitive and piezoresistive tactile sensors?
A1: Capacitive sensors detect changes in capacitance due to distance variation, while piezoresistive sensors measure resistance changes under applied force, often offering higher sensitivity and lower hysteresis.
Q2: Why are flexible circuits important for tactile sensors?
A2: FPCs allow conformal integration on curved surfaces, robotic joints, or wearables while maintaining reliable electrical connections under repeated flexing.
Q3: In what applications are optical tactile sensors commonly used?
A3: They are often employed in robotics research, advanced manipulation systems, and scenarios where cost-effectiveness and immunity to certain electrical interferences are priorities.