Bluetooth Low Energy (BLE) beacons enable low-power, cost-effective indoor positioning through Received Signal Strength Indication (RSSI). By measuring signal attenuation between fixed beacons and mobile receivers, systems estimate distances and compute locations using trilateration. While simpler than time-of-flight or angle-of-arrival methods, RSSI positioning requires careful attention to RF hardware design, propagation modeling, and PCB implementation to achieve usable accuracy.
RSSI Measurement Principles
RSSI quantifies received RF power at the link layer, typically reported in dBm. Values range from approximately 0 dBm (idealized maximum) to −100 dBm, with less negative values indicating stronger signals. In a BLE beacon deployment, the transmitter broadcasts at a known power level while the receiver records RSSI from multiple beacons. Distance is inferred from the difference between transmitted and received power using a path-loss model that incorporates frequency, environment-specific exponent, and reference distance. Because RSSI reflects both distance and local propagation conditions, raw measurements exhibit temporal noise, multipath fading, and shadowing that must be mitigated through filtering, averaging, or sensor fusion.
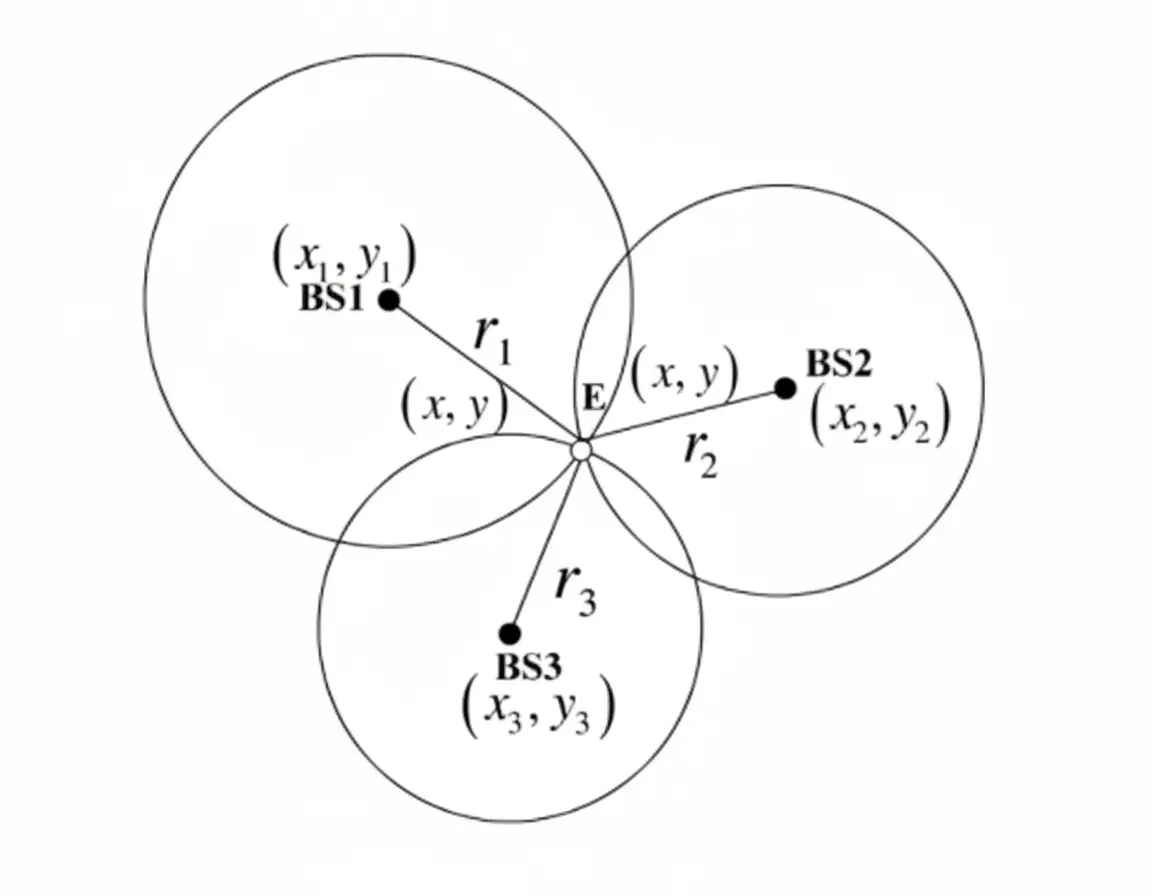
Trilateration and Positioning Algorithms
Trilateration uses distance estimates from at least three beacons with known coordinates to solve for the receiver location. Each beacon defines a circle of possible positions; the intersection of these circles yields the estimated coordinate. In practice, algorithms apply weighted least-squares solutions or particle filters to handle inconsistent distance estimates caused by walls, furniture, and human bodies. Presence detection represents a simpler mode that confirms only whether a receiver lies within a defined region, requiring just one beacon-receiver pair.
Applications in Indoor Positioning and Asset Tracking
BLE RSSI positioning supports wayfinding in airports and shopping centers, asset tracking in warehouses and hospitals, personnel attendance in industrial sites, and proximity marketing. Its low power consumption and minimal infrastructure cost make it attractive for large-scale deployments where sub-meter accuracy is not mandatory. Integration with inertial sensors or Wi-Fi further improves stability in dynamic environments.
![]()
Design and Manufacturing Challenges
Accurate RSSI measurement depends on stable RF front-end performance. Antenna radiation pattern, matching network losses, and receiver noise figure directly influence the dynamic range and repeatability of RSSI readings. Environmental factors—temperature drift, humidity, and mechanical stress—can alter antenna characteristics and trace impedances, degrading positioning consistency. Scaling production requires tight control of component placement, solder joint quality, and antenna tuning to maintain uniform performance across thousands of beacons.
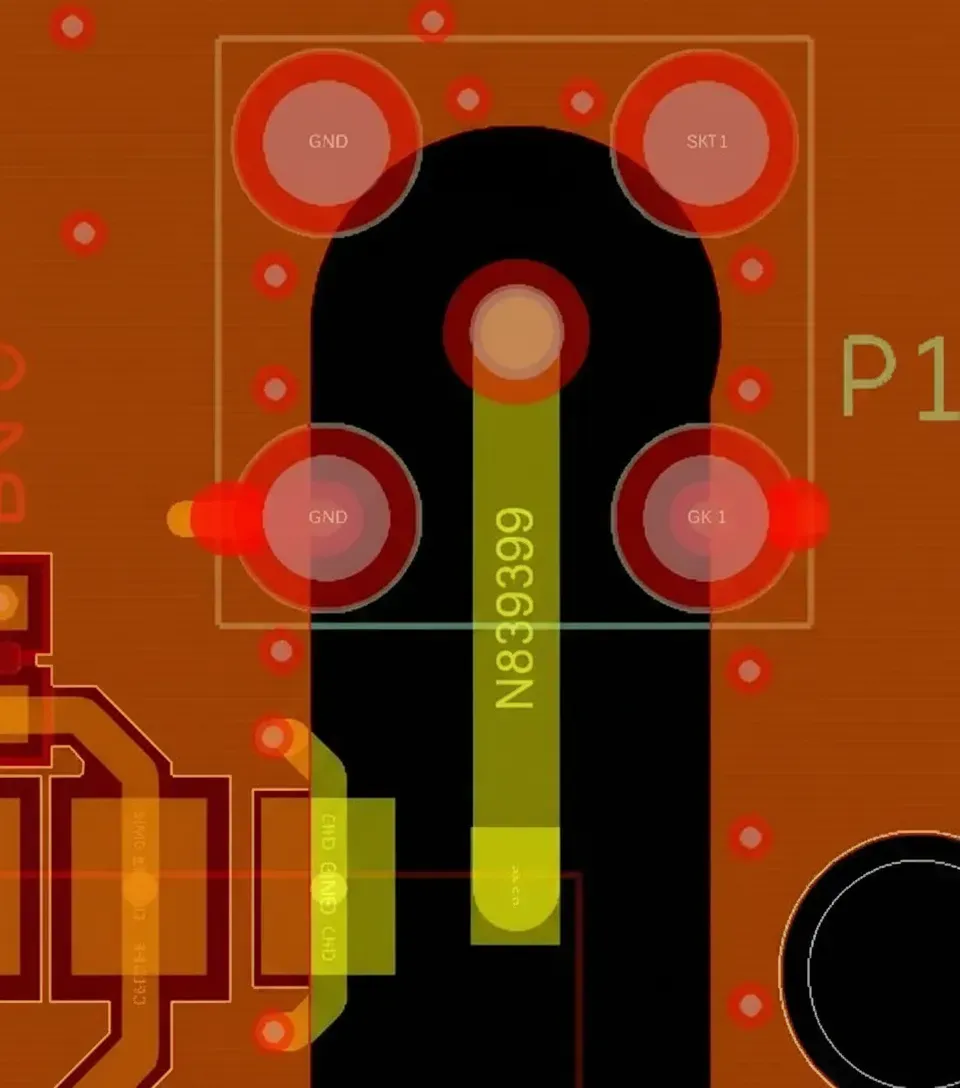
Materials and PCB/FPC Relevance
PCB design for BLE beacons must minimize added loss and maintain consistent impedance in the 2.4 GHz band. Low-loss dielectrics such as FR-4 variants or specialized high-frequency laminates reduce insertion loss in feedlines and matching networks. Controlled copper thickness and surface roughness preserve signal integrity at the antenna port. Flexible printed circuits (FPC) enable compact, conformable antenna structures or interconnects in small beacon housings. High-density interconnect techniques support dense routing when multiple sensors or additional radios are integrated. Thermal management and coefficient-of-thermal-expansion matching become important when beacons operate across wide temperature ranges. Conformal coatings and robust surface finishes protect against moisture and corrosion in deployed environments. Manufacturing processes such as precise etching, laser drilling, and automated impedance testing ensure that each beacon delivers repeatable RSSI performance.
Industry Trends and System Integration
BLE 5.1 and later specifications introduce direction-finding capabilities (AoA/AoD) that complement RSSI for improved accuracy. Hybrid positioning systems combining RSSI with inertial measurement units, ultra-wideband, or 5G timing advance are emerging for industrial IoT and smart-building applications. Miniaturization and lower power budgets drive continued integration of RF front-ends, microcontrollers, and sensors onto compact, multi-layer PCBs. These trends increase the importance of design-for-manufacturability practices that balance RF performance with cost and yield at volume.
PCB and Electronic Manufacturing Relevance
PCB fabrication and assembly processes directly determine the RF consistency required for reliable RSSI positioning. Controlled-impedance routing, low-loss dielectric selection, and precise via structures maintain antenna matching and minimize front-end losses. Flexible circuit constructions support space-constrained or mechanically flexible beacon designs. Rigorous electrical testing, environmental qualification, and process controls verify that each board meets the sensitivity and stability targets needed for accurate distance estimation. These manufacturing capabilities allow electronics suppliers to deliver high-reliability BLE beacon modules and RF PCBs that support consistent performance in real-world indoor positioning deployments.
Conclusion
Bluetooth beacon RSSI positioning provides a practical, low-power method for indoor location services by converting measured signal strength into distance estimates and applying trilateration. Real-world accuracy depends on stable RF hardware performance, careful propagation modeling, and robust filtering. PCB material selection, impedance control, and precision manufacturing directly influence receiver noise figure, antenna efficiency, and long-term measurement repeatability. As BLE positioning systems scale across commercial and industrial environments, the ability to produce consistent, low-loss RF PCBs and flexible circuits remains essential for dependable system operation.