How Large Language Models Work
Explains applying large language models to protocol identification: pretrain-finetune workflow, data preprocessing, semantic analysis and deployment for network traffic.
In the rapidly evolving field of electronics, the Robotics & Artificial Intelligence category serves as a comprehensive resource for engineers, hobbyists, and innovators seeking to harness cutting-edge technologies. This section delves into the intersection of mechanical systems, intelligent algorithms, and electronic components, offering practical knowledge to design and implement solutions that drive automation and smart functionality. From foundational concepts in robotic hardware integration to advanced AI-driven control systems, our articles cover a wide spectrum of topics. Readers can find detailed guides on selecting microcontrollers for robotic arms, tutorials on embedding machine learning models into embedded systems, and insights into optimizing sensor networks for real-time data processing. Best practices are emphasized throughout, including strategies for power management in autonomous devices and ensuring reliability in AI-enhanced circuits. These resources highlight technical relevance, such as using PCB layouts to support neural networks or integrating vision systems for object detection, all grounded in industry standards. The practical value of this category extends to real-world applications, where robotics and AI transform industries like manufacturing, healthcare, and consumer electronics. For instance, learn how to build AI-powered drones for precision agriculture or develop intelligent prosthetics that adapt to user movements. By addressing challenges like scalability and interoperability, our content equips you with actionable strategies to innovate effectively. Our curated selection of articles provides in-depth exploration of emerging trends, such as edge AI computing and swarm robotics, fostering a deeper understanding of how these technologies integrate with PCB design. Whether you are prototyping a simple bot or scaling complex AI systems, the knowledge here empowers you to push boundaries and achieve tangible results in your projects.
Explains applying large language models to protocol identification: pretrain-finetune workflow, data preprocessing, semantic analysis and deployment for network traffic.
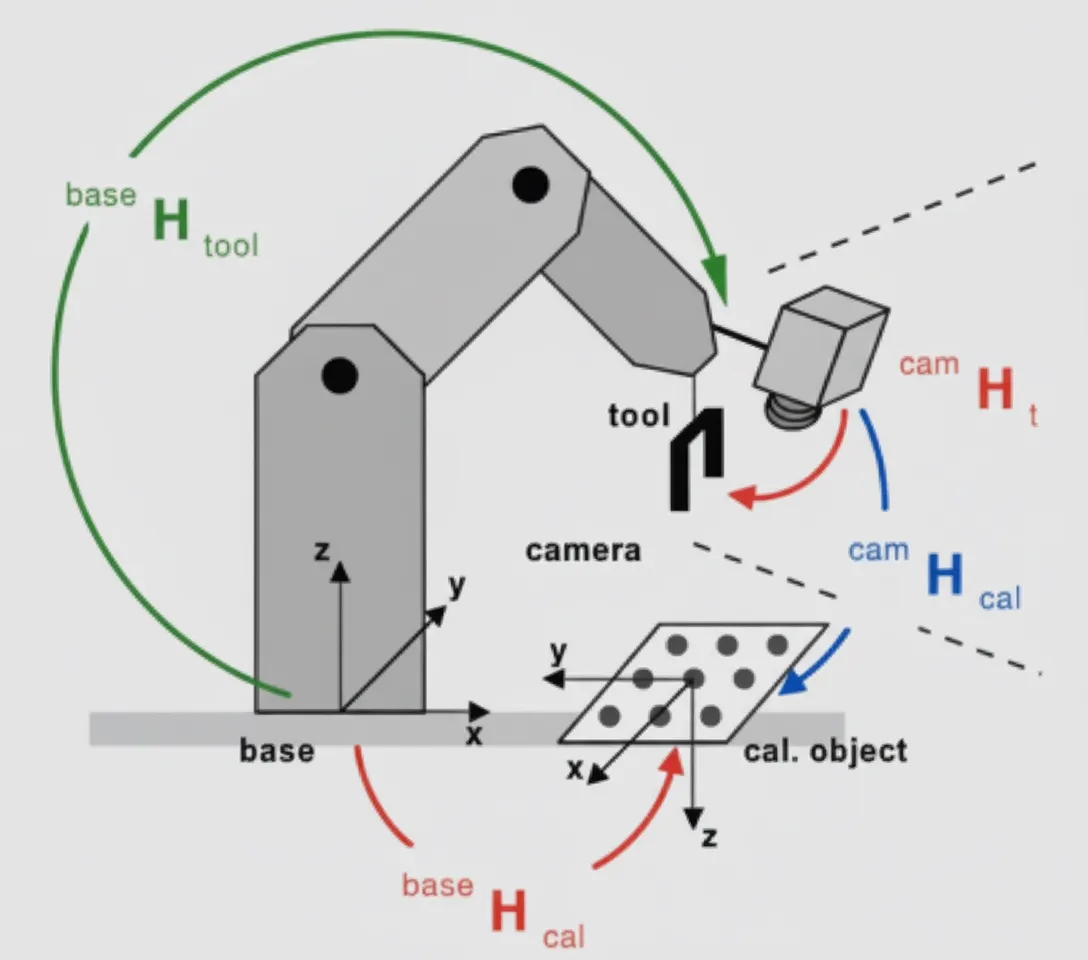
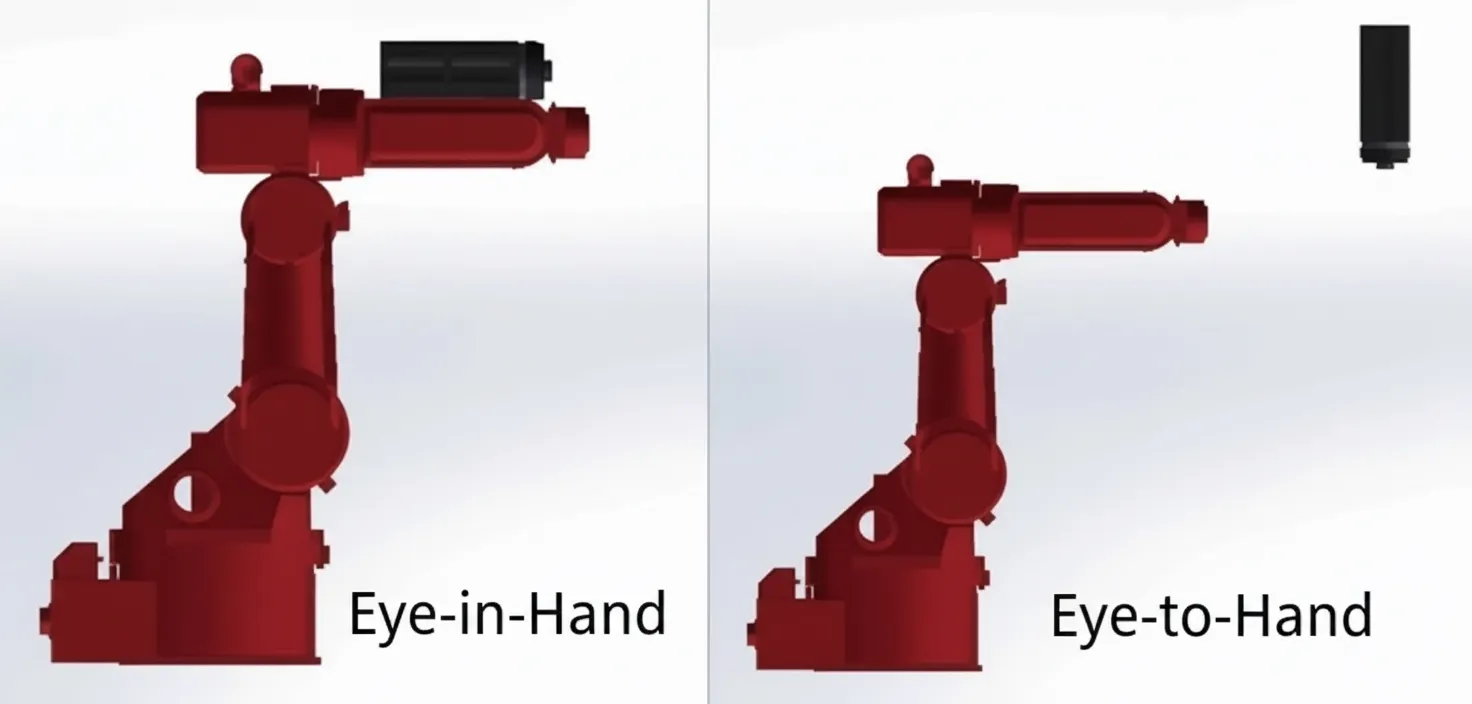
Hand-eye calibration guide: derive camera-to-robot coordinate transforms using nine-point calibration, Halcon sample code, and eye-to-hand vs eye-in-hand methods.
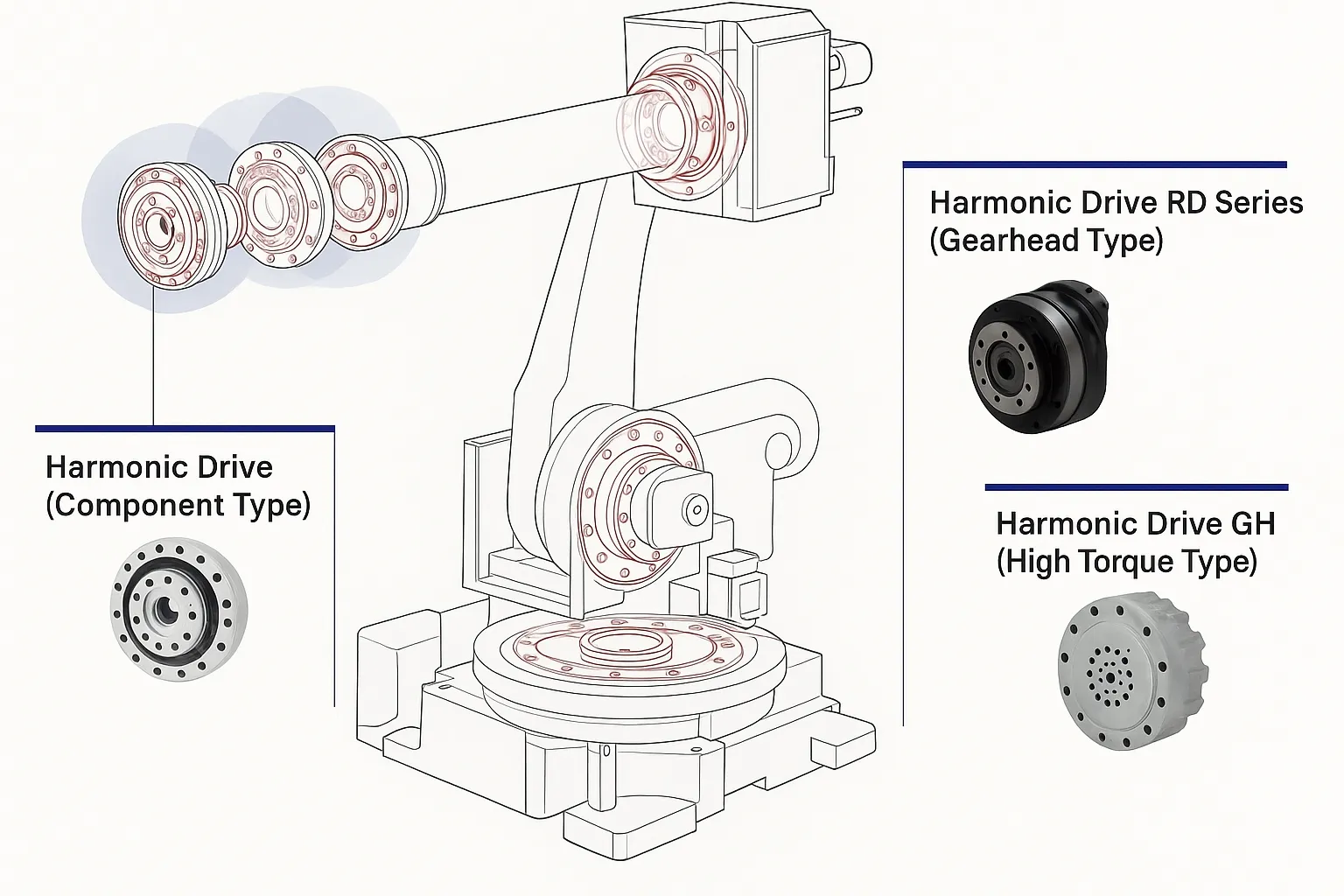
Technical overview of precision reducers for robot joints: design requirements, internal structure teardown, market share analysis and Nabtesco's cycloidal reducer technology.
Technical overview of robots: components (actuators, sensors, power, control), robotic arms, locomotion, hobbyist platforms, and AI methods for autonomous behavior.
Analysis of ground robots and autonomous systems: development, integration challenges, ethical and technical barriers, and battlefield deployments in the Russia–Ukraine conflict.
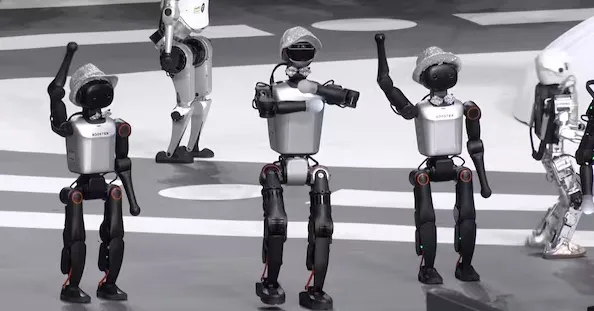
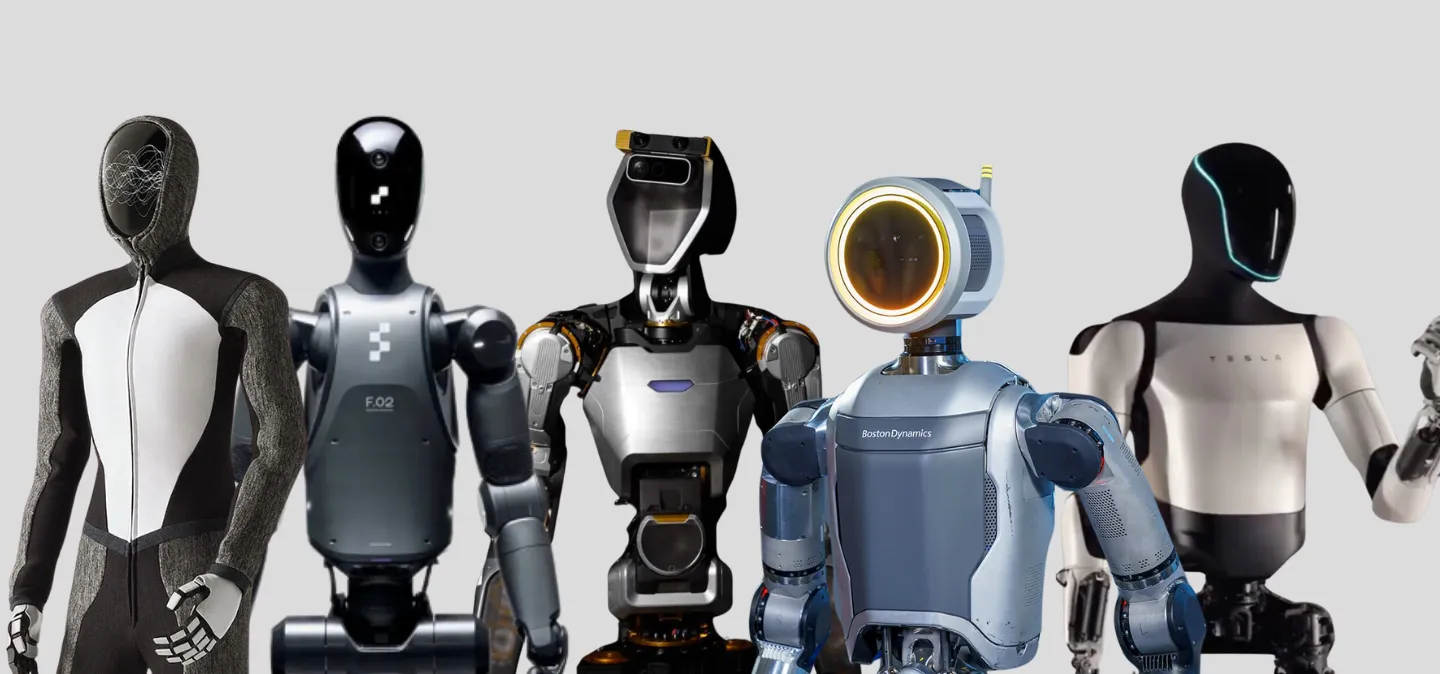
Overview of humanoid robots: history, industry drivers, control challenges like bent?knee gaits, and recent advances toward market deployment with large AI models.
Overview of robotic grasping methods and perception: model-based, half-model, and model-free approaches, pose estimation, vision systems, and deployment challenges.
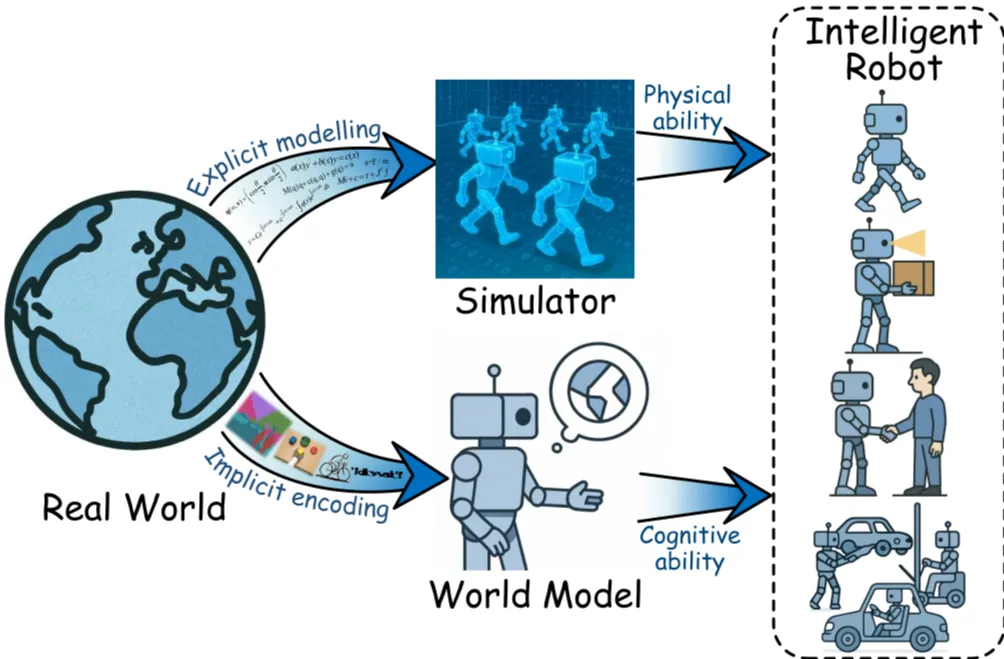
Review of embodied intelligence for mobile manipulators: status, multimodal perception, cognition, autonomous decision making, joint motion and manipulation planning, challenges.
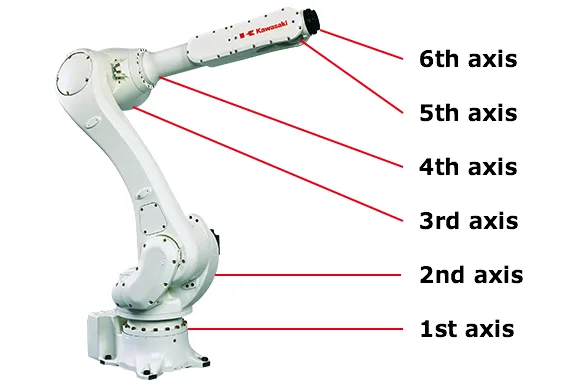
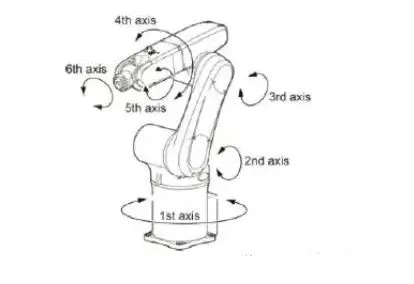
Practical guide to industrial robot selection: nine technical parameters—payload, reach, repeatability, axes, speed, inertia, IP rating—to match robots to applications.
Analysis of the humanoid robots market in China: industry players (veterans, startups, automakers, software, native developers), market size forecasts and deployment outlook.