Python Code Collection for Robotics Algorithms
Collection of Python implementations of robotics algorithms for autonomous navigation: localization, SLAM, mapping, path planning, and path-tracking examples.
In the rapidly evolving field of electronics, the Robotics & Artificial Intelligence category serves as a comprehensive resource for engineers, hobbyists, and innovators seeking to harness cutting-edge technologies. This section delves into the intersection of mechanical systems, intelligent algorithms, and electronic components, offering practical knowledge to design and implement solutions that drive automation and smart functionality. From foundational concepts in robotic hardware integration to advanced AI-driven control systems, our articles cover a wide spectrum of topics. Readers can find detailed guides on selecting microcontrollers for robotic arms, tutorials on embedding machine learning models into embedded systems, and insights into optimizing sensor networks for real-time data processing. Best practices are emphasized throughout, including strategies for power management in autonomous devices and ensuring reliability in AI-enhanced circuits. These resources highlight technical relevance, such as using PCB layouts to support neural networks or integrating vision systems for object detection, all grounded in industry standards. The practical value of this category extends to real-world applications, where robotics and AI transform industries like manufacturing, healthcare, and consumer electronics. For instance, learn how to build AI-powered drones for precision agriculture or develop intelligent prosthetics that adapt to user movements. By addressing challenges like scalability and interoperability, our content equips you with actionable strategies to innovate effectively. Our curated selection of articles provides in-depth exploration of emerging trends, such as edge AI computing and swarm robotics, fostering a deeper understanding of how these technologies integrate with PCB design. Whether you are prototyping a simple bot or scaling complex AI systems, the knowledge here empowers you to push boundaries and achieve tangible results in your projects.
Collection of Python implementations of robotics algorithms for autonomous navigation: localization, SLAM, mapping, path planning, and path-tracking examples.
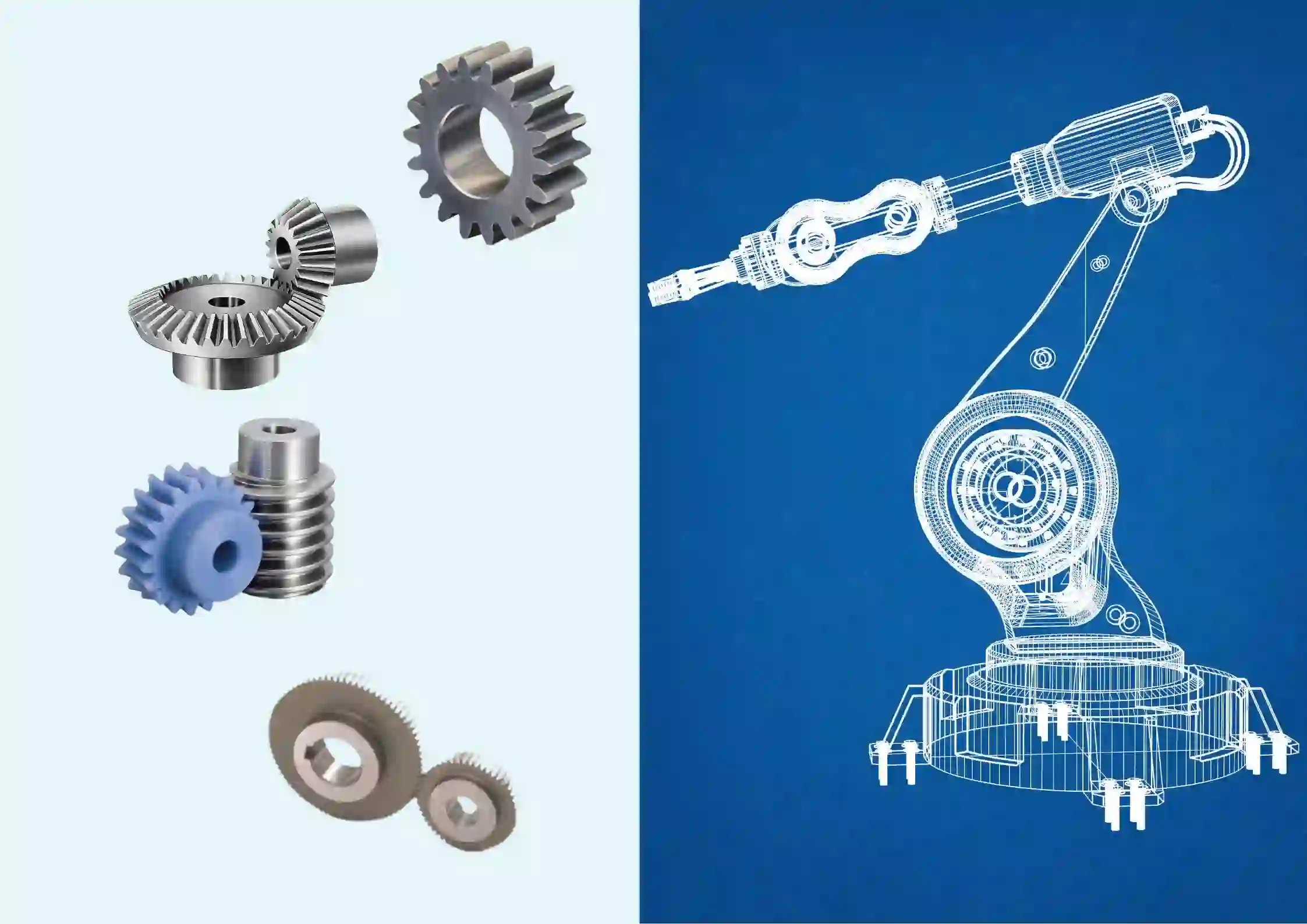
Overview of gear reducer role, structure, and common types (harmonic drive, RV, planetary, cycloidal) used in robotic joints to increase torque and precision.
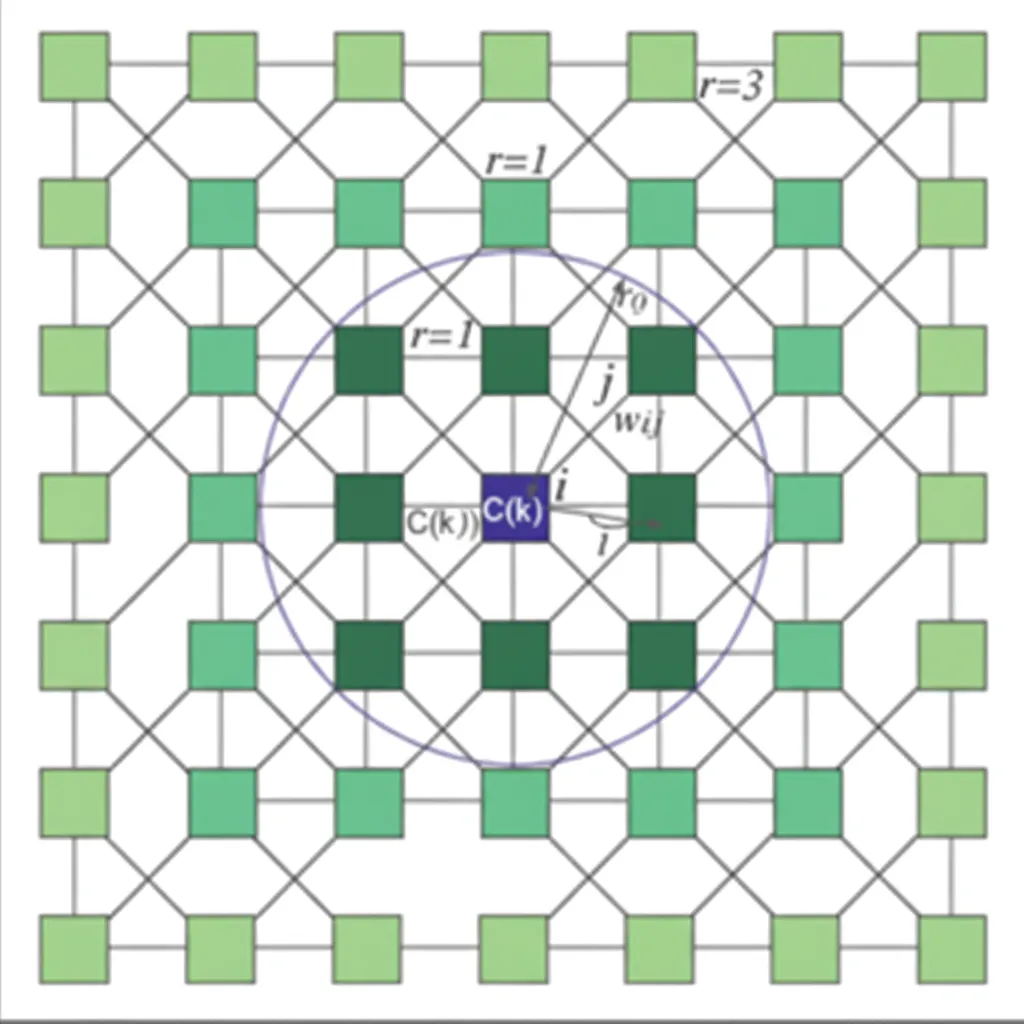
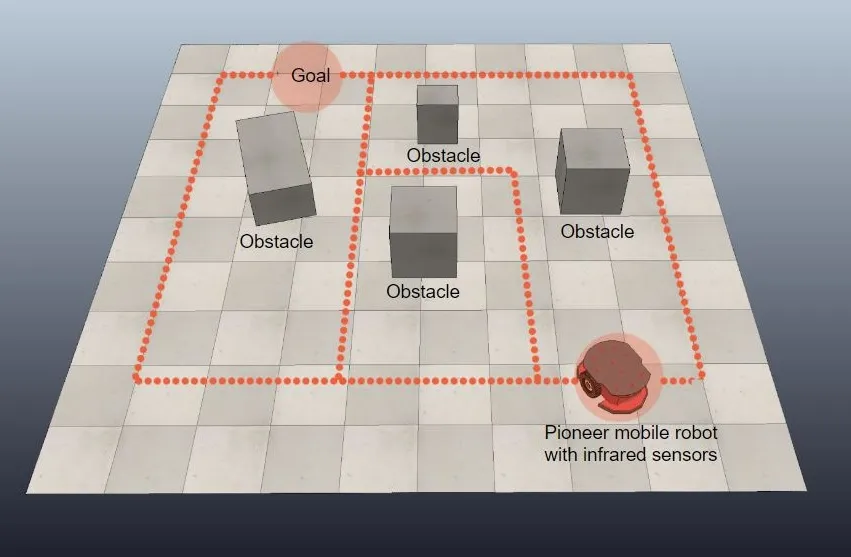
Comprehensive survey of complete coverage path planning (CCPP) methods, covering random collision, cell decomposition, biologically inspired, template, and intelligent algorithms.
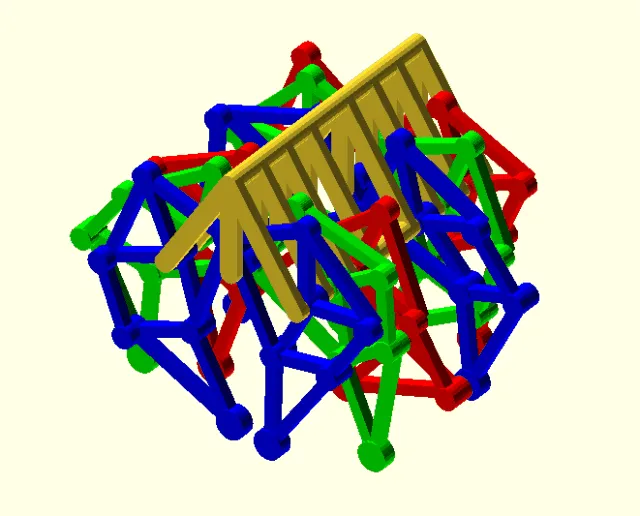
Survey of planar linkages for robot locomotion, detailing parallel four-bar, Chebyshev, Klann, Jansen, Peaucellier and Watt designs for walking mechanisms.
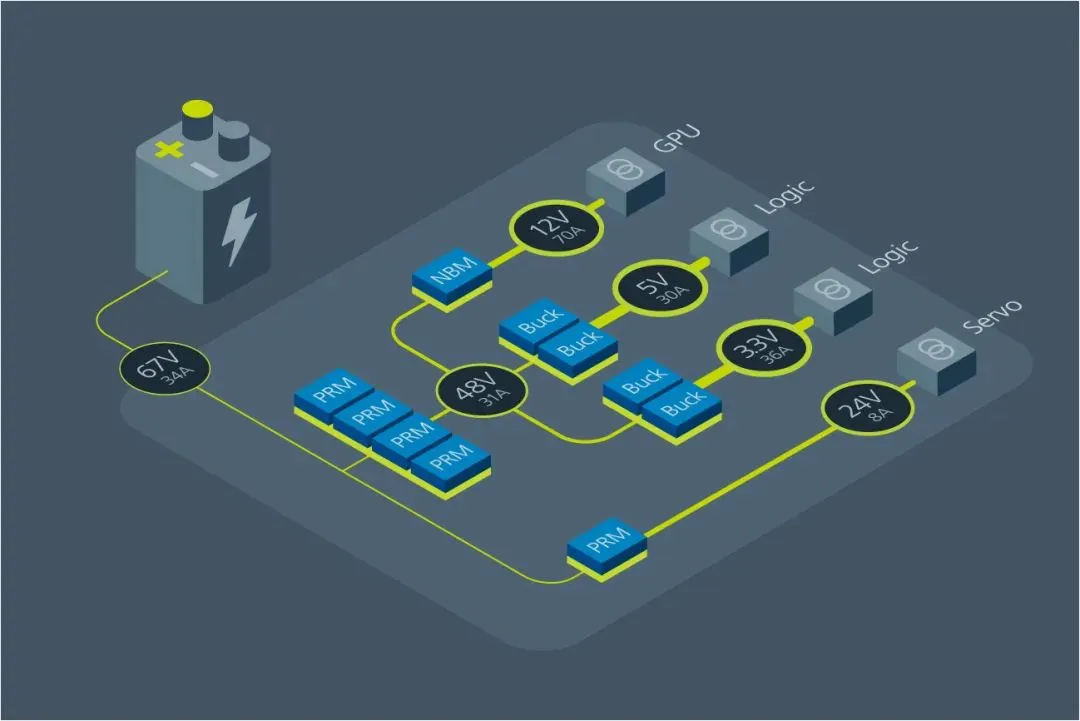
Technical guidance for designing scalable, high-power-density power distribution networks for mobile robots, covering 48 V architectures, modular converters and tethered power.
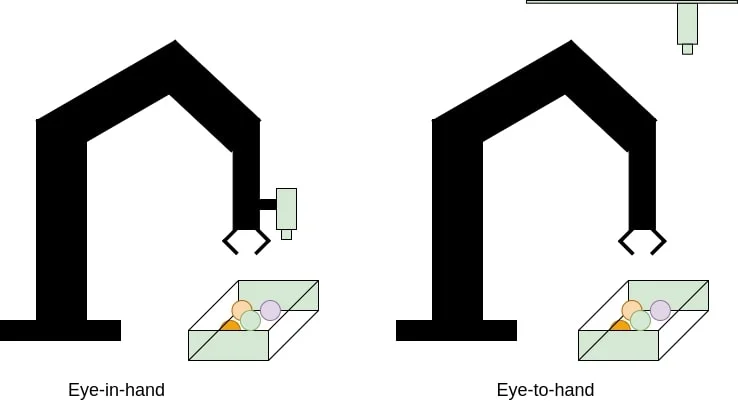
Comprehensive overview of robot visual servoing and machine vision: definitions, PBVS/IBVS classification, image Jacobian challenges, control issues and research directions.
Overview of an open-source GitHub library for robot path planning, implementing search-based (A*, Dijkstra) and sampling-based (RRT, RRT*) algorithms in Python.
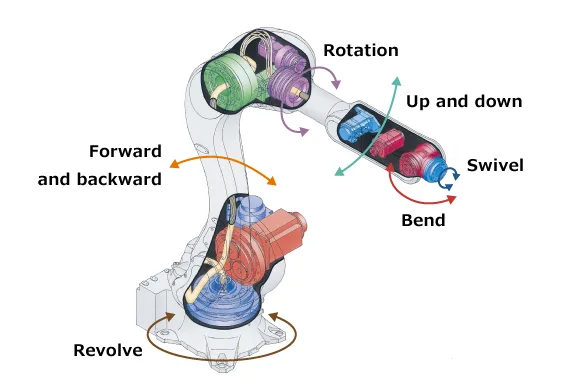
Technical overview of industrial robot components — mechanical structure, control system, sensors, and communication interfaces — and their functions for precision manufacturing.
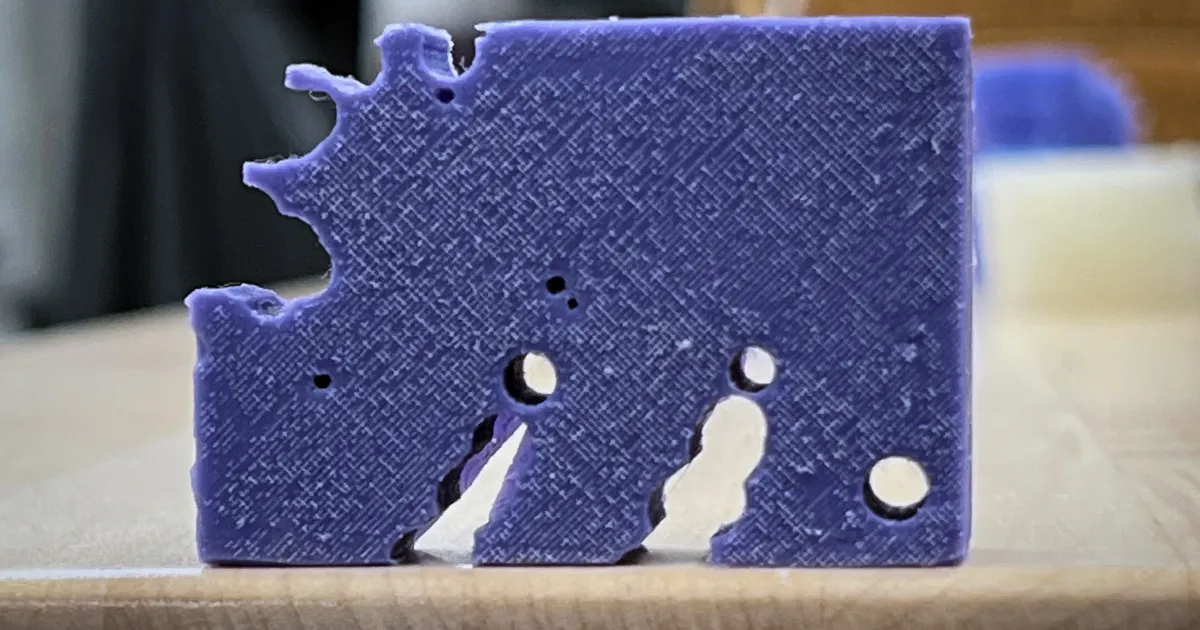
AI-designed robots: Northwestern's 'instant evolution' algorithm designs and 3D-prints soft walking robots from a block in 26 seconds.
Technical overview of Tesla Optimus using on-board vision for limb calibration, autonomous object classification, and closed-loop control in block-sorting tasks.
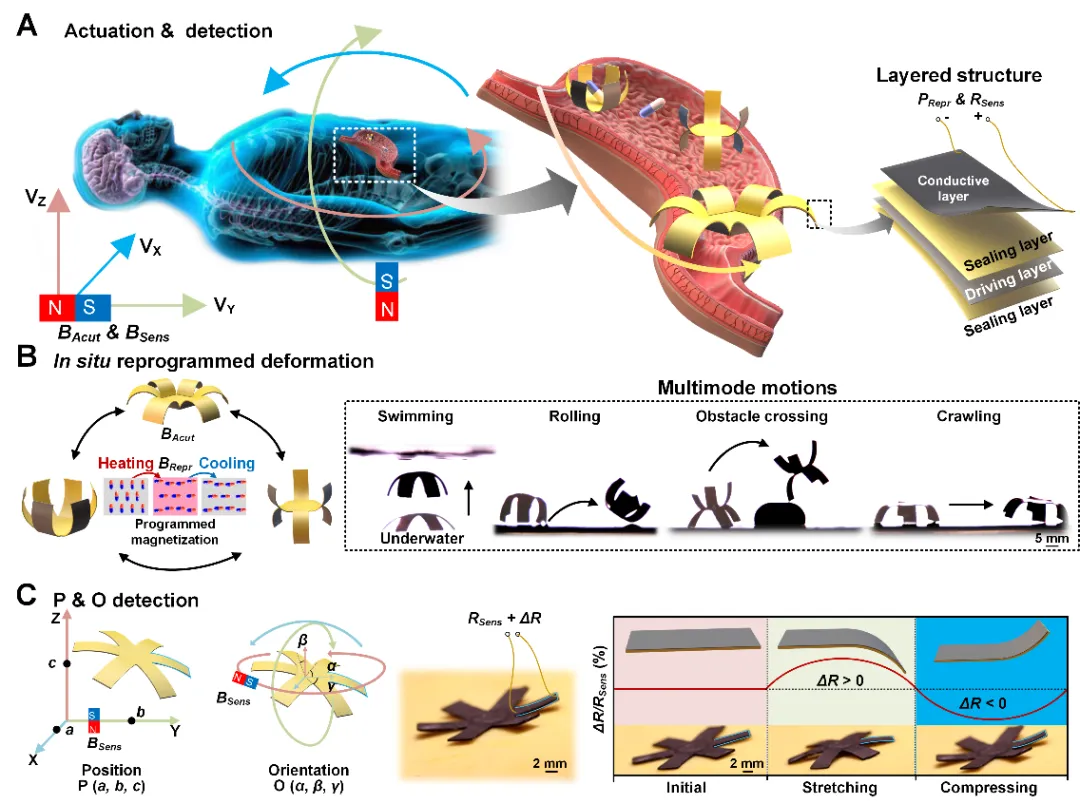
Design and fabrication of a magnetic-driven robot integrating in-situ motion programming and onboard pose sensing via 4D spray printing for GI applications.
Overview of electronic controller modules for industrial robots, covering robot controller architecture, motion control, sensors, EOAT, teach pendants, and system integration.